部署
将生成的代码部署到nvidia®Tegra®硬件targets
您可以将GPU CODER™与MATLAB®NVIDIA 万博1manbetxJETSON的CODER™支持包®和Nvidia Drive®平台在嵌入的NVIDIA GPU上部署MATLAB算法。具体来说,您可以针对Nvidia Jetson并在任一窗上驱动木板家族®或Linux®系统。支持软件万博1manbetx包使您能够与NVIDIA目标进行远程通信,并控制外围设备进行原型设计。MATLAB入口点函数被部署为独立可执行文件,即使硬件实时连接与主机计算机断开连接,该函数仍将继续运行。
To install this support package, use the Add-On Explorer in MATLAB. For information on the supported development platforms, seeNVIDIA董事会的安装和设置先决条件(NVIDIA JETSON万博1manbetx和NVIDIA驱动器平台的MATLAB编码器支持包)。
笔记
Starting in R2021a, theNVIDIA GPU万博1manbetx的GPU编码器支持包is namedNVIDIA JETSON万博1manbetx和NVIDIA驱动器平台的Matlab编码器支持包。To use this support package in R2021a, you must have theMATLAB编码器产品。
功能
对象
coder.hardware |
创建从C/C ++代码生成的硬件板配置对象MATLABcode |
杰森 |
Connection tonvidia杰森硬件 |
驾驶 |
Connection toNvidia Drive硬件 |
话题
MATLAB
- 在NVIDIA硬件上构建并运行可执行文件
从MATLAB命令行定位嵌入式NVIDIA板。 - 使用GPU编码器应用程序在NVIDIA硬件上构建并运行可执行文件
通过使用GPU编码器应用程序来定位嵌入式NVIDIA板。 - Relocate Generated Code to Another Development Environment
Package generated files into a compressed file that you can relocate and unpack with a standard zip utility.
万博1manbetx
- Targeting NVIDIA Embedded Boards
Build and deploy to NVIDIA GPU boards. - Numerical Equivalence Testing
比较模型和生成代码模拟的结果。 - 参数调整和通过外部模式进行监视
通过开发计算机和目标硬件之间的TCP/IP通信通道调试参数和监视信号。 - Generate CUDA ROS Node from Simulink(ROS Toolbox)
Configure Simulink® Coder™ to generate and build a CUDA® ROS node from a Simulink model. - 使用Yolo V2深学习算法在ROS中的车道和车辆检测(ROS Toolbox)
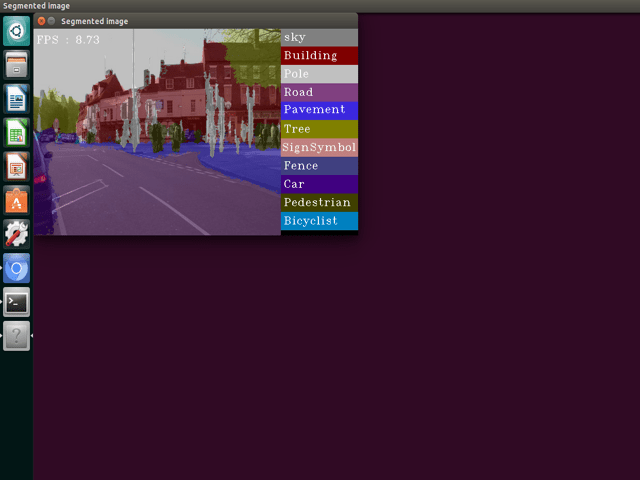
This example shows how to use deep convolutional neural networks inside a ROS enabled Simulink® model to perform lane and vehicle detection. - Sign Following Robot Using YOLOv2 Detection Algorithm with ROS in Simulink(ROS Toolbox)
This example shows how to use Simulink® to control a simulated robot running on a separate ROS-based simulator.
特色示例






You can also select a web site from the following list:
美洲
- América Latina(Español)
- 加拿大(英语)
- 美国(英语)