PCFITPLANE
将飞机适合3-D点云
句法
Description
model= PCFITPLANE(ptCloudIn,,,,maxDistance)
This function uses the M-estimator SAmple Consensus (MSAC) algorithm to find the plane. The MSAC algorithm is a variant of the RANdom SAmple Consensus (RANSAC) algorithm.
model= PCFITPLANE(ptCloudIn,,,,maxDistance,,,,referenceVector)referenceVector输入。
model= PCFITPLANE(ptCloudIn,,,,maxDistance,,,,referenceVector,,,,maxangulardistance)
[[additionally returns the linear indices to the inlier and outlier points in the point cloud input.model,,,,嵌入式,,,,outlierIndices] = PCFITPLANE(ptCloudIn,,,,maxDistance)
[[___,,,,另外,使用前面的任何语法返回inlier点到模型的距离的平均误差。MeanError] = PCFITPLANE(ptCloudIn,,,,maxDistance)
[[___] = PCFITPLANE(uses additional options specified by one or moreptCloudIn,,,,maxDistance,,,,姓名,,,,Value)姓名,,,,Valuepair arguments.
Examples
Detect Multiple Planes from Point Cloud
加载点云。
加载("object3d.mat")
Display and label the point cloud.
图PCSHOW(PTCLOUD)XLABEL(“ x(m)”)ylabel("Y(m)")zlabel(“ Z(M)”)title(“原始点云”)

设置最大point-to-plane距离(2厘米)plane fitting.
maxDistance = 0.02;
Set the normal vector of the plane.
参考值= [0,0,1];
Set the maximum angular distance to 5 degrees.
maxangulardistance=5;
检测第一个平面,表格,并从点云中提取。
[model1,inlierIndices,utlierIndices] = pcfitplane(ptcloud,...maxDistance,referenceVector,maxAngularDistance); plane1 = select(ptCloud,inlierIndices); remainPtCloud = select(ptCloud,outlierIndices);
Set the region of interest to constrain the search for the second plane, left wall.
ROI = [-inf,inf; 0.4,inf; -inf,inf];sampleIndices = findpointsinroi(retusptCloud,roi);
检测左壁并从其余点云中提取。
[[model2,inlierIndices,outlierIndices] = pcfitplane(remainPtCloud,...maxDistance,SampleIndices=sampleIndices); plane2 = select(remainPtCloud,inlierIndices); remainPtCloud = select(remainPtCloud,outlierIndices);
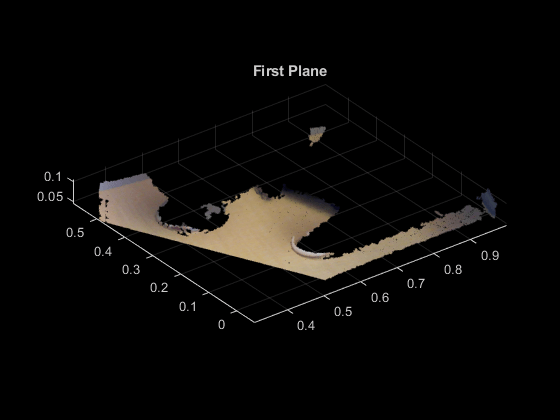
绘制两架平面和其余点。
图pcshow(plane1)标题(“第一平面”)
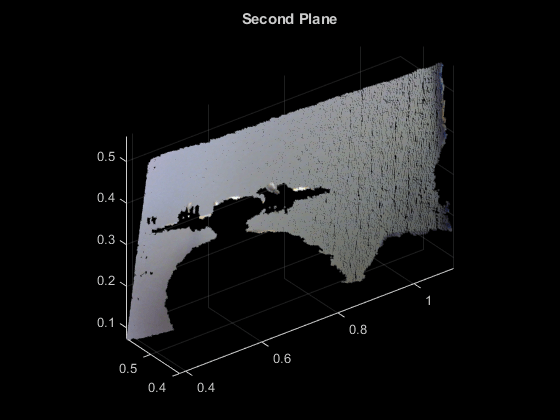
图pcshow(plan2)标题("Second Plane")
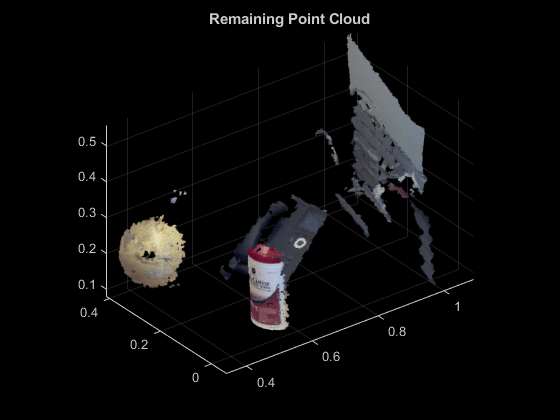
图pcshow(reteptCloud)标题("Remaining Point Cloud")
Input Arguments
输出参数
References
[1] Torr,P。H. S.和A. Zisserman。“ MLESAC:一种新的可靠估计器,并应用于估计图像几何形状。”计算机视觉和图像理解。2000。
扩展功能
版本历史记录
You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)