场强减弱控制
开发场强减弱控制永磁同步电动机永磁同步电动机
开发场强减弱控制永磁同步电动机永磁同步电动机
设计和实现运动控制算法
场强减弱或磁技术增加一个电动马达的速度高于其评级的降低扭矩。场强减弱用于电机控制在自动化应用程序和电动车辆和机车牵引电动机控制实现电机转速高时低扭矩是可以接受的。
的永磁同步电机(永磁同步电动机)在这些应用程序中很受欢迎,因为它的高功率密度、高速度和快速的动态响应。然而,永磁同步电动机速度是有限的,当定子端电压达到逆变器输出的极限。因此,永磁同步电动机需要场强减弱,以增加其轴转速高于设计等级。获得更高的电机速度的一个方法是调节逆变器电力电子控制定子d -和q-axis电流磁转子磁铁产生的空隙通量。
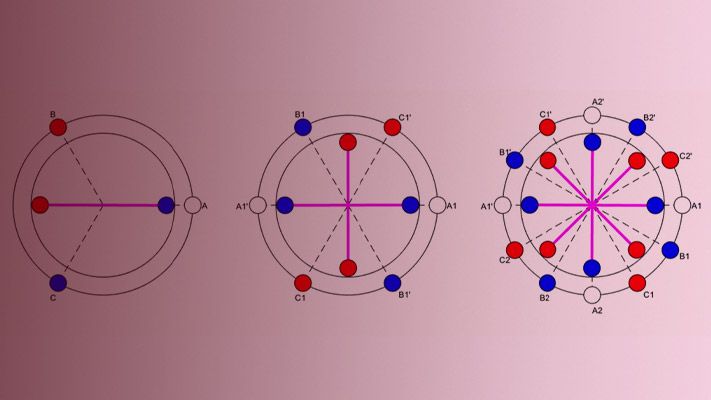
场强减弱控制包括减少由此产生的d-axis通量,\ (\ lambda_ {d} \),通过降低的影响产生的气隙磁链与永久磁铁,\ (\ lambda_{点}\)。这是通过驱动组件的磁化d-axis永磁同步电动机的定子电流负如下图1所示。

图1的向量表示结果d-axis通量,λd
转矩速度特性曲线在图2显示电机的反电动势(定子电压)电动机转速的比例上升。这种行为发生在永磁同步电动机的恒转矩区,在那里磁场定向控制(FOC)是一种公认的方法调节电机。然而,当速度继续上升,外加电压达到最大和EMF电压超过外加电压,防止电机的速度增加。增加速度,电动机转速高于基础场强减弱模式使用,同时保持一个恒定的输出功率,扭矩和运动速度的乘积。在场强减弱,电机旋转速度最大可用电压,最大扭矩为代价的减少。
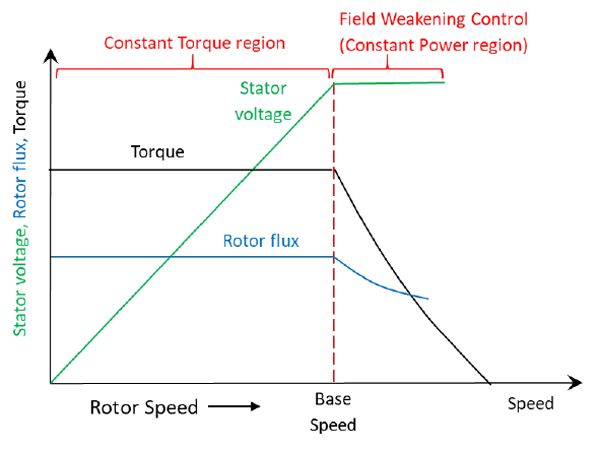
图2永磁同步电动机的转矩和速度特征
图3说明了场强减弱控制操作的交叉电压限制椭圆和当前限制圆左边的定子电流(id,我问)飞机。

图3永磁同步电动机的电压和电流限制
理解场强减弱,当前矢量轨迹可以评估使用轨迹OABC绑定场强减弱的区域。我沿着OA轨迹是最大转矩/安培(该项目的)曲线,电流可以通过操纵当前矢量轨迹与OA曲线。轨迹二世是当前限制圆从A到b .当前限制定义约束的直流总线和电力电子。轨迹三世代表深在公元前场强减弱,最大扭矩/ volt (MTPV)曲线。MTPV操作期间,电动机产生电压内允许的最大速度和转矩约束椭圆,有界的直流总线。无论力瞬态响应,优化场强减弱轨迹或操作点总是位于灰色地带。
图4显示了系统级框图场强减弱控制的永磁同步电动机万博1manbetx®。外速度控制回路生成一个转矩命令吨场强减弱控制块作为输入。内部电流环组成克拉克和公园的转换和一个空间矢量发电机。
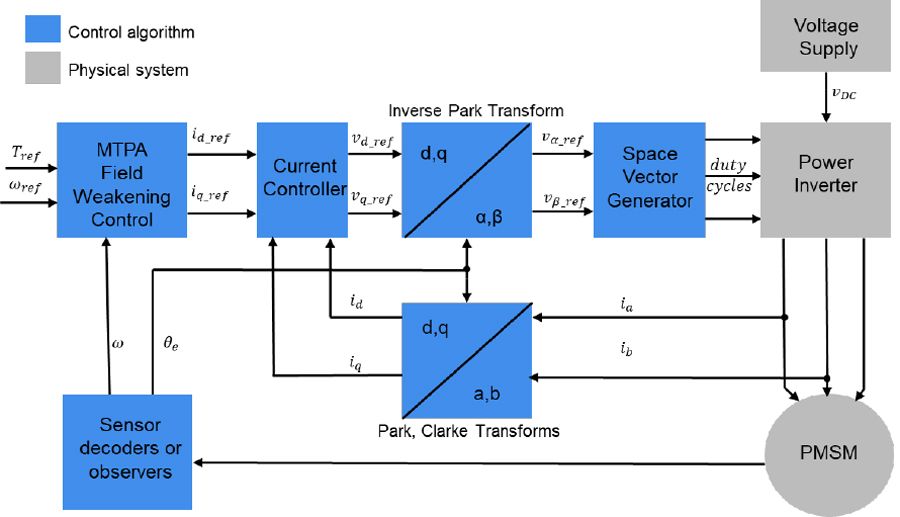
图4概述永磁同步电动机控制场强减弱
电机控制Blockset™提供参考的例子显示场强减弱控制和代码生成部署来帮助你实现场强减弱控制使用万博1manbetx。
了解更多关于如何设计和实现电机控制算法,明白了电机控制Blockset和Simscape电气™。


30天的探索在你的指尖。

对无刷直流电机控制算法
读电子书