欢迎参加计算机视觉简化网络研讨会。我叫桑迪普,是MathWorks产品营销团队的一员。我们的客户广泛使用计算机视觉来解决不同应用领域的各种各样的视觉问题。例如在自动驾驶中设计车道偏离预警系统。在机器人方面,帮助计划火星漫游者。
这是一个基于计算机视觉的交通监控系统的简单例子,就像你开车经过红绿灯时可能注意到的那样。在这里,一个基于摄像头的监控系统正在跟踪现场任何给定时间点的车辆数量。本系统主要采用计算机视觉对从摄像机发出的光视频中的每一帧中的车辆进行检测和计数。在视频中检测像汽车这样的物体是一项常见的计算机视觉任务,但类似的还有很多。
那么这些常见的任务或问题是什么呢?如果你是计算机视觉的新手,你可能会对如何检测场景中的物体感兴趣。或者如何测量图像中的物体或区域。或者我如何检测对象,或者如何使用深度学习对事件进行分类。在这个视频中,我们的目标是帮助你开始解决这些常见的计算机视觉任务或问题。你们会用MATLAB通过一些实际例子来做这个。
这些是我们在接下来的30分钟里会讲到的例子。让我们从第一个例子开始。在这个例子中,左边是一堆杂乱的扑克牌。右边是一张特定纸牌的图像。我的目标是在一堆纸牌的图像中检测或定位特定的纸牌。这看起来是一个简单的任务。然而,要解决这个问题还有很多挑战。感兴趣的对象可以比模板图像看起来更小或更大。可以旋转,也可以歪斜。或者它们可能部分隐藏在其他物体后面。 These are some common challenges that you will notice in most object detection problems.
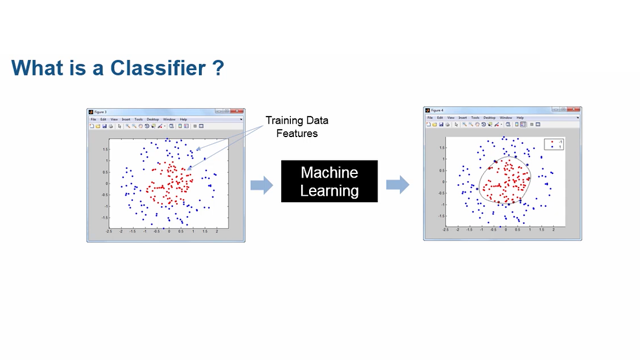
在这里,不能使用模板匹配之类的标准图像处理算法来找到这个对象。您将需要一种稍微复杂一些的、健壮的方法。为了解决这个问题,我选择了一个非常基础的计算机视觉工作流,叫做特征检测提取和匹配。因此,在我们开始理解这个工作流之前,让我们先理解什么是特性。简单地说,特征是一幅图像中的一个独特区域,它导致另一幅图像的唯一匹配。在很多图像中都可以重复。一些很好的图像特征的例子是角落,边缘,斑点,或者可能是一个对象的模板,或者场景本身的区域。
那么这个工作流是什么样的呢?基于特征的对象检测工作流主要包括三个步骤。首先,检测目标模板图像中感兴趣的特征。绿色的标记显示了这一点。对另一张图也做同样的处理。其次,在检测到的特征周围找到一个区域,并将有关该区域的一些信息编码到所谓的特征描述符中。这叫做特征提取,用标记周围的绿色圆圈表示。对两个图像都这样做。
第三,您可以在两个图像的提取特征之间寻找相应的匹配。然后删除任何异常值。有一组匹配功能后,您可以估计在场景中的对象的位置。现在,让我们去Matlab,看看如何解决这个问题。
这是我的MATLAB环境。现在,我要做的第一件事是阅读我们正在处理的两个图像。一是我们要找的红桃王的参考图像。第二,是包含这张卡的杂乱图像。我将使用I am read from image pricing toolbox来读取这两张图片。然后用I am sure配对把它们放在一起展示。
这是我的图片。如你所见,红心王牌和图像牌的方向和比例与参考图像不完全相同。可能也不在同一个参考平面上。因此,像模板匹配这样的简单图像定价技术在这种情况下不起作用。我们需要一种更稳健的方法,即在这些图像中寻找特征,并比较它们以找到匹配。在下一节中,我将使用一种叫做surf的算法来检测这些图像中的特征。
现在,冲浪工作专门在二维灰度图像。所以我必须使用RGB来创建,将彩色图像转换为灰度。然后,我使用了计算机视觉工具箱中的检测冲浪特征和参考图像。这将输出图像的检测特征点。接下来,我想可视化这张图像的检测到的特征点。这里,我选择了最强的50个点。
这里是参考图像,以及整个图像上50个最强的特征点,它们的位置用叉表示。而这些位置点周围的圆圈代表了特征的规模,这两者都是特征描述符的重要组成部分。这些特征描述符代表了描述它们的独特的、有趣的信息,并将它们与图像中的其他特征区分开来。
现在,SURF算法通过检测此图像中的BLOB来定义这些功能。Blobs只不过是具有高对比度像素的图像中的连接区域。在我们的案例中,一块Blob是卡中的心脏套装。或者国王的眼睛是角色K区域的较小的眼睛。现在,像冲浪一样有许多通过电脑视觉工具箱可用的其他检测算法。例如,我们有快速在检测图像中的角落时真正擅长。因此,请参阅帮助文档以了解有关所有这些不同特征检测算法的更多信息。
现在,让我们回到我们的脚本,看看接下来会发生什么。接下来,我还要检测卡片图像上的冲浪特征。确保在这两幅图像上使用相同的检测算法,这样我们就可以进行苹果对苹果的比较,并匹配这些特征。让我们运行这部分。看看这个,图像上有300个最强的点。在这里,你可以看到我们有特征点在红桃王牌区域,也在图像中的其他牌上。
现在,一旦我们检测到这幅图像的特征点,接下来,我们将提取特征描述符,即这些点周围的区域地图。为了做到这一点,我使用了计算机视觉工具箱中的提取特征函数。我通过灰度图像和之前的检测点。这将给我们特征向量,以及每幅图像对应的位置。现在,这里使用的提取方法,取决于使用的检测算法,在我们的例子中是surf。我现在有两个图像的特征描述符了。
接下来,我需要比较它们以找到匹配项。为了做到这一点,我将使用计算机视觉工具箱中的匹配特征它返回两个输入特征集中匹配特征的索引。然后可以得到两幅图像对应的匹配特征点,并使用show match feature查看匹配点。让我们运行此部分,并查看两个图像之间的匹配点。
如图所示,匹配特征在这两张图片中找到了大量匹配。这些对局也在红桃王区域除了黑桃j的这两个点。注意这里有一些特征匹配,比如卡片字符区域键,和卡片图像中的字符匹配。还有K的倒数。这样做的原因是surf算法是旋转不变的,这意味着它将检测匹配和特征,而不管它们的方向。而且,不管他们的规模如何。这就是为什么基于特征的检测器比简单的模板匹配技术更健壮。
现在我们已经找到了两张卡片之间的匹配,我们还没有完成检测问题。我需要通过去除异常值来改进匹配,包括重复的匹配,比如反向匹配字符K,这样我就可以在纸牌图像中找到红桃王所在的确切区域。为此,我将使用计算机视觉的估计几何变换函数工具箱来计算确定参考图像的变换矩阵几何,和空间的转换,这样它的边界地区内最适合红心国王卡在卡的形象。
这个函数还返回两个图像的内嵌点,这些内嵌点是通过使用一种叫做RANSAC的算法消除所有离群值(如我们在黑桃杰克牌中看到的)而获得的。随机抽样一致性(RANSAC)是一种数学模型,通过对观察点进行随机抽样来估计内嵌点,以找到最优拟合结果。在我们的例子中,这是一个几何变换,有助于将参考卡片图像与杂乱卡片的图像相匹配。您可以通过参考估计几何变换函数的帮助信息来了解关于这个算法的更多信息。
现在,让我们继续运行这一节,再次查看匹配的特性。但这一次,离群值很遥远。那就这样吧。这些异常值和黑桃j都被移除了。同时,注意我们之前看到的一些模糊匹配也被排除了。最后,使用我们之前得到的变换矩阵,我们可以继续,变换一个与参考卡片图像的尺寸相同的矩形,并把这个新的方框多边形叫做。
然后,用它来输入卡片的图像,以表明被检测到的卡片在杂乱的卡片图像中的确切位置。这是最后的结果。到目前为止,我们所看到的是如何使用参考图像检测图像中的卡片。现在,如果我们想要检测类型,或者识别这张牌呢?也就是说,这是一张红桃k。现在,我们可以再次使用特征匹配方法来做这个。但让我们看看一个更复杂的方法我们将使用训练有素的检测算法来执行检测。
训练有素的探测器,而不是使用一个模板,和匹配特性,我们将使用surf-like技术收集大量图像的特性集说,这个角色k,然后使用支持向量机等机器学习模型,我们将设计一个检测器可以检测这个角色在其他图像。由于经过训练的检测器已经用成百上千个模板图像的特征进行了训练,所以它是一种更健壮的方法,就像在不同的光照条件下检测物体,或试图通过它的类来寻找物体一样。也就是说,就像在图像中检测一辆汽车,而不考虑它的型号或型号。
因此,在我们的例子中,让我们继续使用火车检测器,通过检测到的卡片中的字体来检测卡片字符。也就是红心K牌中的字母K。正如你们所知,我会用光学字符识别,或OCR算法来做这个。让我们继续,看看如何在MATLAB中使用这个算法。首先,我们将使用fitgeotrans变换卡片的图像以匹配参考图像。我们这样做是为了使图像可以在空间上进行调整以匹配参考图像的尺寸。通过这样做,我们可以很容易地提取卡片中的角色和套件信息,因为我们知道这在任何卡片的左上角区域都是可用的。
让我们继续,使用imwarp函数对卡片图像进行反翘曲处理,看看输出结果。这是红桃王纸牌区域,纸牌的图像被变换了。接下来,我需要提取包含字符和西装的卡片中的区域,并使用提取的区域分别检测它们。要提取这些区域,我有一个助手函数,getCardROIs,它为我执行提取,并返回包含字符和suit的区域。我使用蒙太奇命令来显示两个提取的区域。因此,让我们运行这一节,并查看输出。
这里是作为两个独立的子图像提取的区域。接下来,我需要在第一副图像中识别字符。为此,我可以使用光学字符识别(OCR)算法。OCR是一种正确使用的技术,用于检测和识别图像中的文本。这可以是打印的,也可以是手写的。在MATLAB中,我们在计算机视觉工具箱中有一个预先训练好的OCR函数。默认情况下,它可以检测多种字体,但也可以训练它来检测自定义字体。在我的脚本中,我使用了OCR函数来检测子图像中的字符。
这里,是OCR返回的输出。如你所见,它已经成功检测到k这个card character。接下来,我需要在第二个sub image中找到suit的类型。为此,我采用了一种使用模板匹配的更简单的方法。我只是将这个子图像与四种不同套装中的一组模板图像进行比较。我在用幻象。TemplateMatcher系统对象从计算机视觉工具箱执行模板匹配。如果你想了解更多关于系统对象的信息,请去找vision。帮助文档中的TemplateMatcher。
我在for循环中运行匹配的所有模板图像。在这里,在for循环中,我一次读取一个模板图像,调整子图像的大小以匹配模板图像,然后执行模板匹配。在本例中,系统对象返回一个匹配指标,其中最大的指标值对应于最佳匹配。让我们运行这个section,看看子图像的结果是什么。如您所见,我们已经成功检测到匹配这些心脏的模板的输出。
这里需要注意的一点是,模板匹配是一种非常初级的检测技术,它在这种特殊情况下工作得很好。但是,如果这些西装没有对齐、没有同等规模、或者没有对比变化,就会惨败。因此,对于更复杂的检测问题,考虑使用更健壮的方法,如我们前面看到的基于特征的检测。最后,我们可以用检测到的卡片字符来标注卡片图像,并匹配红心王的名字。
像OCR一样,Matlab中有许多其他对象探测器通过计算机视觉工具箱可用于检测视频和博客中的条形码,人,面部,前景对象等一些常见对象。其中一些探测器也可以用您自己的数据培训,以检测其他感兴趣的对象。例如,在公路场景中检测行人。
MATLAB,通过计算机视觉工具箱,也为您提供了一套现成的基于一些流行的深度学习网络的物体探测器。在MATLAB中也可以输入,并使用预先训练好的深度学习网络来解决目标检测问题。例如,在这个视频中,我们展示的是一个预先训练的网络,叫做AlexNet,它已经被训练去检测大约1000种不同的物体类别。MATLAB允许您用一行代码导入这个常用的网络,并在计算机视觉应用程序中使用它。
有许多深入学习模型,如alexnet,它在研究中使用,以及您可以快速导入Matlab的商业领域,并在解决方案中开始使用它们。万博 尤文图斯现在,请注意,您可以使用新数据在MATLAB中重新培训这些网络以检测其他感兴趣的对象。在这里,是一些普遍使用的深层学习探测器的列表。另外,请注意,这些在MATLAB中可用作即用常用功能。我要强调的另一件事是Matlab,除了使用预先训练的网络易于对计算机视觉问题进行深度学习,还提供互动应用,如标签应用程序,以及制作整体的深网络设计师应用程序免费培训的工作流程这些网络正在从头划伤设计新的网络,这是一个非常方便和剥削过程。
现在,让我们来看第二个例子,即测量图像中物体的大小。在这个例子中,我所拥有的是一张混合了不同类型的图像,以及一些其他物体。我想做的是把图像中的种类分离出来,然后确定所有种类的总价值。例如,如果我有两个25美分的硬币和一个5美分的硬币,总价值是0.55美元。现在,一种方法是,根据它们的大小来确定图像中的不同种类。然后,如果我知道每一种硬币的真实直径,比如,1 / 4是24.26毫米,我可以使用这两种信息,并找出每一种硬币在图像中有多少种。
之后,它是计算图像中硬币的总值的简单数学。现在,要比较图像中的基于像素的维度,以及对象的实际大小或维度,我们需要计算现实世界单位中的像素的大小。此因素将帮助我们找到任何对象的真实大小,或图像内的区域。现在,在真实世界单位中准确测量像素大小存在一些挑战。一个主要挑战是由于相机性质引起的扭曲可能会有效地影响此类测量。
为了解决这种失真相关的挑战,我将使用摄像机校准工作流。校准使我们能够估计镜头和相机的属性参数。那么这些相机属性是什么呢?有一些固有的特性,比如焦距,光学中心,透镜畸变,系数。还有一些外部参数,比如位置,相机相对于物体的方向。使用估计的参数,我们就可以校正从镜头中拍摄的图像,以应对可能存在的畸变。
摄像机标定是一种非常常用的技术,在计算机视觉中有许多应用。例如,作为校正图像以消除镜头失真问题的预处理步骤,或试图通过将同一镜头拍摄的多个图像拼接在一起来构建全景视图。或者,当从镜头估计深度或物体的接近程度时,特别是当使用工作室基于视觉的相机时。在我们的例子中,我们将主要专注于使用校准来消除图像中的畸变,以帮助精确测量像素大小和真实世界的单位。
现在,让我们进入MATLAB,看看如何解决这个问题。这是我们要处理的图像。正如你所看到的,这个图像实际上有一些类型,还有一些其他的物体在图像的底部。在图像的顶部,我们有一个棋盘图案。棋盘格模式对两件事很重要。一是能够进行相机校准。第二步,就是变换图像的方向,以及图像中可能存在的其他畸变和倾斜。
让我们开始第一步,摄像机校准。为了执行摄像机校准,我将使用摄像机校准应用程序,它可以通过计算机视觉工具箱获得。要得到这个,我要到应用程序选项卡。在这里的图像处理和计算机视觉部分,我可以访问相机校准应用程序。让我们打开它。
相机校准器应用程序的第一步,是带来我们将用于校准步骤本身的图像。为了做到这一点,我点击Add images。在这里,我可以选择图像,我要用它来进行校准。在这个例子中,我使用了7张图片。但通常情况下,在钻井情况下推荐使用10至20张图像。同样在这里,它会问你棋盘格的大小它将用于校准过程。我知道棋盘图案中的每一个正方形大约是20毫米。
提供这些,然后应用程序继续,开始查看图像,然后开始检测支票簿。然后给出检测结果。在这里,你可以看到它在所有的六张和七张图像上都检测到了棋盘格。它说它将拒绝其中一个图像。我们点击OK。现在,它已经给我展示了六幅图像它将用于校准过程。
所以这是结果。您可以看到它已检测到每个图像中的每个图像中的棋盘模式中的点。现在,我要做的下一件事就是能够查看相机校准器应用程序中提供的一些选项。这里的第一件事是相机模型。我可以选择标准镜头或鱼眼或广角镜头。在我的情况下,它是标准镜头。所以我只是把它保持为我的默认选择。
此外,我有选择帮助我提高我的参数估计。为此,我具有我实际选择的径向失真系数。径向失真通常是沿着镜头的边缘所看到的,沿着光学中心。您希望纠正这些扭曲专门针对广角镜头。如果您选择,您也可以计算,偏斜和切向扭曲。目前,我将默认保留这些选项。然后,我要去校准按钮。这现在应该前进,开始校准过程,并给我一些结果。
首先我要给你们看的是投影误差。如您所见,复制误差通常是校准误差。我们要确保误差值保持在较低的水平。要做到这一点,就要去掉所有的异常值。在这个例子中,棋盘格的第二幅图肯定比总体平均误差高一点。我要选择删除这个,然后重新校准剩下的5张图片。现在,你可以看到我已经删除了图像,我有了一个更好的整体平均误差,大约是0.57像素。之前,它大约是0.63像素。这并没有太大的不同,但这是试图改善校准结果的过程。
在此之后,我可以继续,并将相机校准参数导出到MATLAB工作空间。和我要将其保存的变量被称为相机参数。现在,所以你知道,如果你要手动进行这款相机校准过程,它可能会变得非常复杂,而且丑陋。相机校准器应用程序确实有助于使整个工作流程非常方便,并且轻松而不是在校准过程中的专家。它允许您自动检测棋盘点,允许您使用不同的相机型号,标准镜头或直角镜头。它还自动校准图像为您,然后使Matlab环境中可用的结果进行前进,并使用它以进一步分析。
好的。所以现在我们已经完成了摄像机校准过程,我已经将摄像机参数保存为mat文件,我们可以继续,看看如何使用摄像机参数来校正硬币的图像。然后,用这个未变形的图像来测量硬币的真实大小。我的最终目标是根据硬币的大小来识别它们,并找到图像中所有硬币的总价值。现在,让我们看看这张图。
所以这是图像。如您所见,它包含硬币,以及图像的下半部分的其他对象。和棋盘图案上半部分。现在,棋盘模式在解决这个问题方面非常显着。我们稍后会详细介绍这一点。使用从摄像机校准过程中获得的相机参数,需要纠正此图像或未置换。这样,在进行进一步之前,图像在进一步之前没有任何扭曲。为此,我将首先加载相机对图像,然后使用从计算机视觉工具箱中的未破坏图像功能来纠正图像。因此,让我们运行该部分,并查看输出。
在我们的例子中,未变形的图像看起来并没有太大的不同。但如果我们使用广角镜头拍摄的图像,那么在不失真后你会注意到显著的不同。接下来,在我开始检测和测量硬币之前,我必须确保图像中的所有像素与真实世界的单位因子具有相同的像素,这是在整个图像中进行精确测量的非常重要的一步。为此,我们必须使用参考棋盘模式转换原始图像,因为我们知道它是真实世界的尺寸。这种转换将确保像素到真实世界的测量在整个图像上是一致的。
现在,让我们看看这个转变是如何工作的。我将使用计算机视觉工具箱中提供的检测棋盘点函数首先确定棋盘图案点。让我们在图像中显示这些点。接下来,使用我了解的信息关于棋盘图案,例如沿行的正方形,以及沿着列,我可以确定侦探棋盘区域的角点。然后,我们将找到一个新的平面中角落的近似位置,这些平面将消除由于摄像机的角度而可能存在的任何透视突起,该突起可能存在于包含棋盘模式的平面和硬币。
我们可以在一个名为basePts的变量中使用这些新类型的点。我们来运行这段曲线,看看基点相对于角点的关系。现在,使用基点作为参考,我们将找到变换矩阵,我们需要将图像投影到由基点表示的平面上。我们用图像压缩工具箱中的fitgeotrans函数来做这件事。这将返回一个变换矩阵,我可以使用imwarp函数来反翘曲类型的图像。让我们运行该部分,并查看输出。
所以这是一个变换的图像。因此,此图像现在已准备好进行准确测量。既然我有一个包含硬币的变换图像,我需要做的下一件事就是检测图像中的硬币,除了圆对象。因此,在本节中,我首先使用Imbinarize函数将变换图像转换为二进制。我这里有一个滑块来调整阈值。这样,我可以从二进制输出获得所需的结果。然后,我正在使用imfindcircles找到来自图像处理工具箱的圆圈,以查找图像中的硬币。
如你所见,我这里有一些参数。我在这里有一个滑块来调整灵敏度参数,这样它只会选择最强的圆圈,代表图像中的硬币。您可以通过参考imfindcircles函数的帮助信息来了解更多关于imfindcircles函数的其他参数。一旦我检测到圆,我知道圆心的像素坐标和半径,我将使用粘圆在硬币图像上显示这些圆形区域。因此,让我们运行这一节,并查看结果。
如你所见,这些硬币被发现是圆形的。它错过了一枚硬币。所以我可以回到我找到圆圈,通过调整滑块来增加灵敏度,以确保我检测到了所有的硬币。这里需要注意的一点是,imfindcircles对于这类检测问题来说并不是一种非常可靠的技术。我们假设硬币是图像中唯一的圆形物体。此外,在等待光线的条件下,圆的探测可能并不总是工作得很好。在这种情况下,我们将不得不使用一种更健壮的方法,比如使用火车检测器,就像我们在卡片检测示例中讨论的那样,来检测图像中的硬币。
现在我们已经在图像中检测到了硬币区域,并且我知道了硬币的大小和像素值,接下来,我将需要计算出真实世界中硬币的大小。为了做到这一点,我首先需要知道像素与真实世界的单位系数是多少,然后我可以用它来计算真实世界的大小,单位是毫米,硬币的半径。为了做到这一点,我将再次使用,棋盘图案作为我的参考。我将像之前一样检测棋盘点,然后以像素计算模式中的正方形的大小。我知道棋盘图案的正方形尺寸是20毫米。通过这个,我可以计算出这个图像的像素到毫米的系数。因此,让我们运行该部分,并查看输出。
所以这里是使用棋盘的毫米因子的像素。因此,现在使用该像素与硬币,尺寸和像素的毫米因子,我可以计算毫米的硬币尺寸。与棋盘平方的已知尺寸一样,我们也知道我们的图像中的硬币类型的真实半径。在我们的情况下,这些是美分,镍和宿舍。
所以在下一节中,我使用真实大小值找到了三种硬币类型的像素大小,以及我们之前计算的像素到毫米的因素。有了这个作为参考,我可以将它们与之前从图像中得到的圆的像素值进行比较。然后我可以把每个圆折成1美分、5美分或25美分。
所以,我首先排序圆圈的半径。然后使用直方图,即matlab函数,将圆圈与硬币像素尺寸作为参考弯曲。让我们运行该部分,以查看这些圆圈的分布作为这三种硬币类型。您可以在图表中看到,我们有两个圆圈,它被盒装为美分,三个作为镍,4个作为距离。我再次使用此直方图函数,以获取此时的计数,并且我显示计数。一旦看到图像中每个硬币类型的计数,我就可以很容易地计算图像中硬币的总值。这是1.17美元,这是图像中硬币的实际值。通过这种方式,我们已经验证了我们的硬币测量,并搭档实际上适用于此图像。
最后,我们可以在硬币的形象上显示我们的最终结果。请注意,我在此处使用了Viscircles,以指示图像中的不同硬币类型,彩色圆圈。现在,如果我们不得不测量像叶子的物体的大小,那么没有具有非常定义的形状的物体的大小,并且没有简单的方法来自动检测图像中的这种对象?在这种情况下,一旦我们知道包含叶片的该图像的像素到MM因子的像素,我们可以使用IMDistLine,这可以让您交互地测量叶区域中的两个像素之间的距离。然后,您可以使用它使用像素到MM因子来计算真实世界单元中的距离。
在这里,我用以毫米为单位的计算机距离代替了像素等级。从某种意义上说,我们已经看到,如果我们有一个参考像棋盘图案在任何图像中,我们可以计算像素到真实世界的单位因子,并使用它来测量图像中任何物体或区域的真实大小。我们在MATLAB中看到的,是支持标准广角镜头的相机校准应用程序。万博1manbetx计算机视觉工具箱提供了一个独立的串行摄像机校准应用程序,以帮助校准从工作室相机对拍摄的图像,通常有用的任务,如深度估计。
这就是最后一张总结幻灯片。我们已经看到了如何使用MATLAB使计算机视觉新手入门变得容易。我们已经看到了一些例子——MATLAB使它很容易,特别是使用现成的功能,和基于深度学习的探测器检测对象,甚至定制他们与您自己的数据,以使真实世界的测量,图像,使用交互式校准应用程序,和对象分析工作流。在预先训练好的网络和文档中详细的例子的帮助下,快速提高深度学习。
所以总之,如果你在想从这里去哪里,这里有一些下一步。转到计算机Vision Toolbox产品页面以了解有关计算机愿景,其应用程序和其他功能的更多信息,以及工具箱的功能。如果您想要更深入的学习如何使用计算机视觉工具箱,请注册教师LED培训课程。这也可以作为在线课程。如前所述,在深度学习中也有一个。如果您已准备好探索产品,并开始解决您的问题,请立即获得产品的试用许可证。
如我们所见,计算机视觉工具箱中有一些基于深度学习的对象检测器。但是深度学习还有很多可以做的。请访问“深度学习工具箱”页面,了解有关该产品及其广泛功能的更多信息。有些人可能还对在硬件平台上运行计算机视觉算法感兴趣,比如基于arm的Raspberry Pi,或者基于gpu的NVIDIA Jetson板。请访问带有MATLAB的嵌入式愿景解决方案页面,了解更多有关这方面的信息,以及MATLAB中的其他硬件实现相关功能。非常感谢大家的关注。