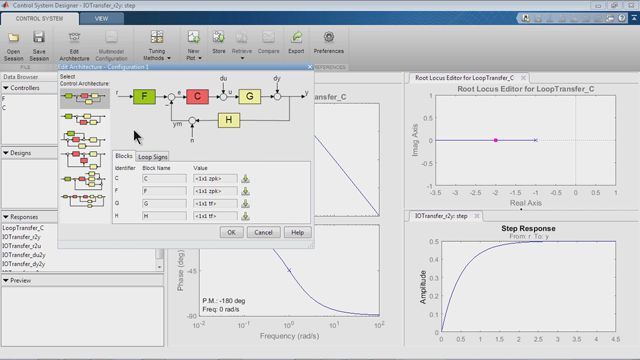
控制系统工具箱允许您轻松地调整PID控制器增益。如果你有一个工厂模型,您可以启动一个PID调谐器应用这种植物模型。当它打开时,它自动为您曲调PID收益实现的平衡性能和鲁棒性。您可以快速尝试不同的控制器类型等比例,比例积分和PID。
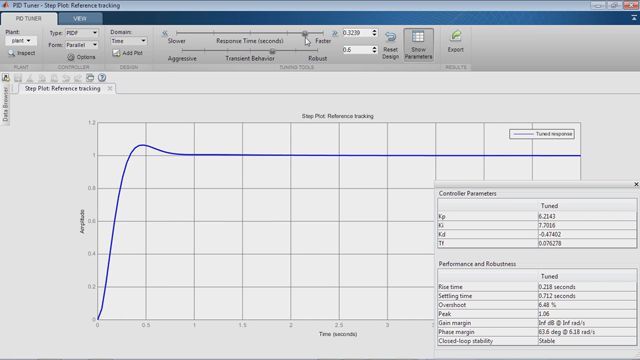
你可以检查调整PID收益以及性能和鲁棒性特征如竞赛时间、沉淀时间、超调,增益裕度,面临利润率。您可以使用交互式的滑块来调整系统的性能。你可以调整的响应时间与第一滑块和第二个面对保证金。除了设置响应图,你也可以看看身体系统的情节。
你也可以看看不同的反应。默认情况下,PID调节器应用显示了使用参考引人注目的响应。但你可以选择看其他反应,如控制器输入和输出扰动的努力和排斥。你可以同时看几个情节。使用这些反应,可以调整控制器的性能最优设定值跟踪或抑制干扰的结果。
一旦你对设计满意,你可以导出PID控制器为MATLAB,它将被表示为一个PID对象。除了PID调节器应用,控制系统工具箱还提供了一个函数,功能优化PID收益相同。这个函数被称为PID调节。
您可以调用这个函数与植物模型作为输入参数设计默认PID控制器,或者你也可以指定所需的交叉频率。函数是一个调整PID控制器的输出由PID对象。MATLAB的工作区中PID对象后,您可以轻松地访问和,如果需要,修改个人收益。
您可以使用PID对象像其他线性时不变模型。例如,您可以计算其阶跃响应闭环传递函数和情节。总结了视频。