{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
准确的植物模型是使用基于模型的设计控制系统开发的Linchpin。通过良好的工厂模型,工程师可以验证其控制系统的功能,通过模拟进行闭环模型循环测试,通过仿真调谐,优化设计,并运行困难的分析或在实际植物上做的风险。
尽管有这些优势,工程师有时不愿意投入创建和验证工厂模型所需的时间和资源。关注点包括运行模拟需要多长时间,构建和验证模型需要多少领域和工具知识,以及获取硬件测试数据以构建和验证模型需要什么类型的设备。
本文描述了使用MATLAB创建永磁同步电机(PMSM)设备模型的工作流程®和Sim万博1manbetxulink®和常用的实验室设备。工作流程涉及三个步骤:
- 执行测试
- 从测试数据识别模型参数
- 通过模拟验证参数
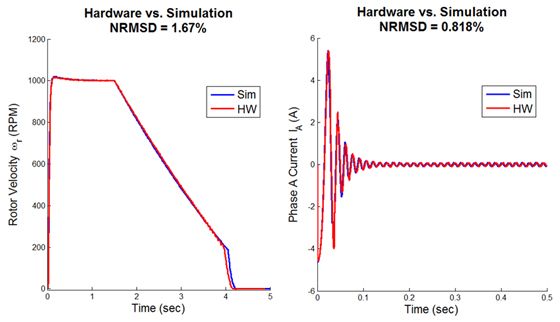
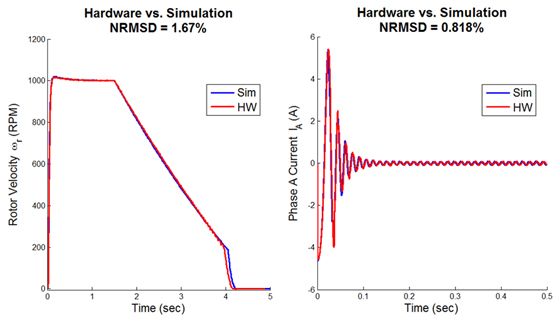
我们使用对象模型来建立和调整闭环永磁同步电机控制系统模型。我们在模拟中使用控制器模型运行阶跃响应和滑行测试,并在使用xPC目标的硬件上运行™ 交钥匙实时测试系统。我们发现仿真结果和硬件结果之间非常一致,转子速度和电机相电流等关键信号的归一化均方根偏差(NRMSD)低于2%(图1)。
植物模型及其参数
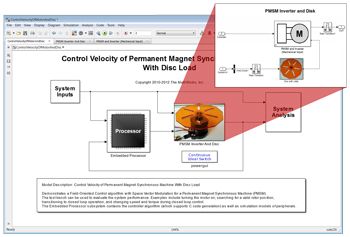
使用SimPowersystems™开发的PMSM工厂模型包括电机和负载 - 在此示例中,丙烯酸盘。该模型具有九个参数,可定义其行为:与负载相关的一个(盘惯性)和与电机相关的八个(图2)。
我们进行了五项测试来表征这些参数:双线摆测试、反电动势测试、摩擦测试、滑行测试和直流电压阶跃测试(表1)。在本文中,我们将重点介绍滑行测试和直流电压阶跃测试。这些测试展示了越来越复杂的参数识别方法,并分别说明了通过曲线拟合和参数估计来提取参数值。
| 测试 | 确定的参数 | 识别方法 |
|---|---|---|
| 双轴摆动测试 | 磁盘惯性(\(h_d \)) | 计算 |
| 回来EMF测试 | 极数(\(p \)) 磁链常数(\(A{pm}\) 扭矩常数(\(kt \)) |
计算 |
| 摩擦试验 | 粘性阻尼系数(\(b\) 库仑摩擦(\(J_0\)) |
曲线拟合 |
| 海岸下降测试 | 转子惯量(\(H \)) | 曲线拟合 |
| 直流电压步骤测试 | 电阻(\(R\)) 电感(\(L\)) |
参数估计 |
表1。模型参数和为表征这些参数而进行的试验。
对于每个测试,我们描述了测试设置,然后解释了我们如何进行测试,获取数据,提取参数值,并验证它。
用滑行试验表征转子惯性
为了表征转子惯性(\(H\),我们将转子旋转至初始速度(\(\omega\{r0}\),并测量转子滑行至停止时的转速(\(\omega\)。使用该测量结果,可通过将\(\omega\u r\)方程曲线拟合至电机滑行至停止期间的测量转速来识别转子惯性。
微分方程[1]描述了电动机的机械特性。设置了海岸沿着沿着沿着载荷测试,以便负载转矩(\(t_ {load} \))始终\(0 \)。一旦电机达到初始,稳态速度,电机就会关闭,使电磁驱动扭矩(\(t_ {Em} \))也是\(0 \)。在这些条件下,对[1]的解决方案是由\(\ OMEGA_R \)[2]的等式给出的
\(\omega_r\)是转子轴的转速
(\(\omega{r0}\)是转子轴的初始转速
\(J_0\)和\(b\)分别是库仑摩擦系数和粘性阻尼系数,通过单独的摩擦试验表征
\(T_ {EM} \)是电磁驱动扭矩(此测试期间0)
\(t_ {load} \)是负载扭矩(此测试期间0)
\[\begin{equation}\tag{1}\frac{d\omega_r}{dt}=\frac{1}{H}(T{em}-b\omega_r-J_0-T{load})\end{equation}]
如果
\(t_ {em} = 0 \)
\(t_ {load} = 0 \)
然后
\ [\ begin {公式} \标签{2} \ oomega_r =(\ oomega_ {r0} + \ frac {j_0} {b})e ^ { - \ frac {b} {h} t} - \ frac {j_0} {b} \结束{等式} \]
进行测试并获取数据
在实验室中,我们创建了一个开环Simulink测试模型,以将电机驱动至万博1manbetx每秒150弧度的初始速度,此时电机驱动装置关闭,转子滑行停止。在整个测试过程中,模型捕获了转速传感器的输出。使用Simulink编码器™ 和xPC-Target,我们将该模型部署到xPC-Target交钥匙实时系统中。我们使用xPC目标执行模型,并将转子转速数据导入MATLAB进行分析。
提取和验证参数值
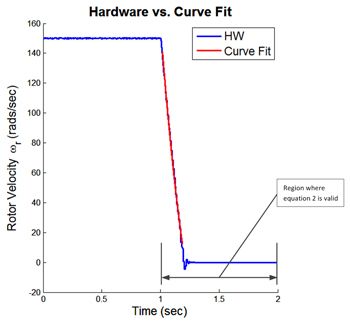
在运行测试后,我们在MATLAB中绘制了测量速度数据,并使用曲线拟合工具箱™ 将转子角速度(\(\omega\u r\)的方程[2]拟合到转子滑行停止时的测量速度数据。使用曲线拟合中的\(H\)值,我们从电机开始滑行的点评估方程[2],并将结果与原始测试数据绘制在一起(图3)。如图3所示,方程[2]的曲线拟合值为\(H\),可准确预测滑行试验期间的电机转速。
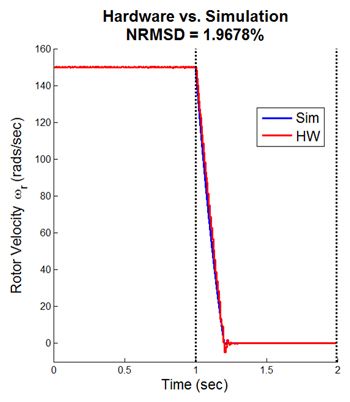
我们使用模型来验证参数识别结果。使用从海岸下降测试中获得的转子惯量值(我们的PMSM模型中的3.2177E-06 kg m ^ 2),我们在Simulink中运行了仿真沿海沿着沿海测试的仿真。万博1manbetx然后我们将与测量结果进行比较并绘制模拟结果(图4)。结果符合较好,标准化的根均方偏差(NRMSD)约为2%。
用直流电压阶跃试验表征电阻和电感
在DC电压步骤中,测试在电动机相A和相位B连接上施加DC电压,并测量所得到的电流。在这些条件下,三相PMSM的表现类似于具有两个串联电阻和两个串联电感器的电路(图5)。
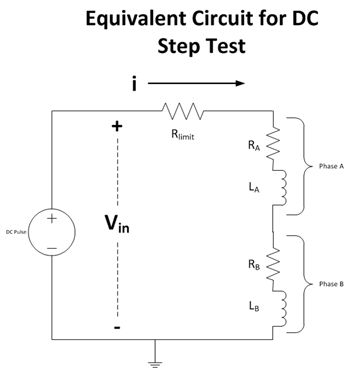
测量的电流(\(i \))用于找到电阻和电感参数值。在测试期间,转子被动态地保持不动,以避免用反电动势波形复制分析,这倾向于反对电流。为避免使用转子燃烧电动机,可以一动不动地,添加电流限制电阻(\(r_ {limb} \)),并且使用步进脉冲而不是稳定的DC电压。
进行测试并获取数据
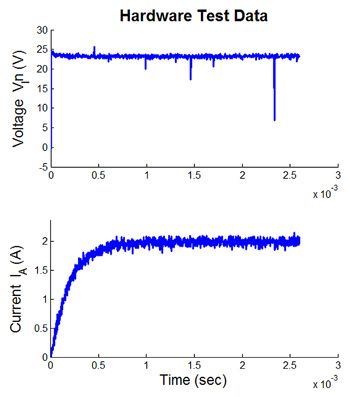
我们再次使用XPC目标和XPC目标交钥匙实时系统进行测试。在Si万博1manbetxmulink中,我们开发了一种在持续时间内产生一系列24伏脉冲的模型,持续约为2.5毫秒。我们使用Simulink编码器将此模型部署到我们的XPC目标系统,并将电压脉冲施加到PMSM的A和相位B端子万博1manbetx上。我们使用示波器测量施加的电压和流过电机的电流,并使用仪器控制工具箱™将测量的数据读入MATLAB,我们绘制了结果(图6)。
提取和验证参数值
从测量数据中提取相位电阻仅需要使用欧姆的法律(\(r = v / i \))使用稳态值进行电压和电流。对于PMSM,我们计算的电阻为23.26伏/ 2.01安培= 11.60欧姆。通过减去10欧姆(电流限制电阻的值),并将结果除以2串联的两相电阻,我们计算了电机相位电阻为0.8欧姆。
表征电感需要更复杂的方法。乍一看,我们似乎可以使用曲线拟合,就像我们在描述转子惯性时所做的那样。然而,由于直流电源的内阻,当进入电路的电流为0时,测试开始时测得的直流电压从24伏的初始值衰减到电流流入电路后23.26伏的稳态值。由于输入电压不是纯阶跃信号,因此对串联RL电路方程的解进行曲线拟合的结果将不准确。
为了克服这种困难,我们使用参数估计和Simulink设计优化™选择更强大的方法。万博1manbetx这种方法的优点在于它既不需要纯粹的步骤输入也不需要曲线拟合。
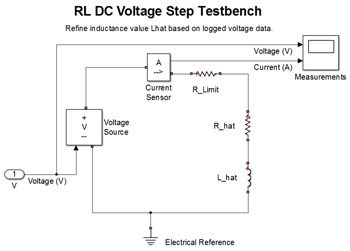
我们使用Simulink和Simscape对电机的等效串联RL电路进行建模™ (图7)。Simulink Desi万博1manbetxgn Optimization将测量的电压作为模型的输入,在已知限流电阻(R_limit)和电机相电阻(R_hat)的情况下,估计电感(L_hat)的值,使模型预测的电流与测量的电流数据尽可能接近。
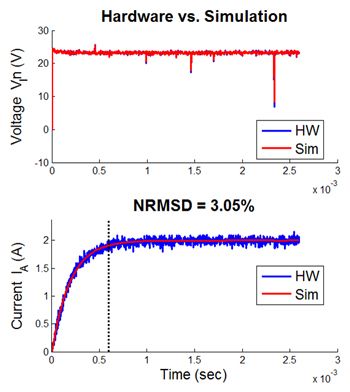
要验证我们获得的相阻力(0.8欧姆)和电感(1.15毫升)的值,我们将值插入我们的PMSM模型中,并用我们用于刺激实际电机的相同输入刺激模型。我们将模拟结果与测量结果进行比较(图8)。结果符合紧密匹配,NRMSD约为3%。
利用对象模型设计控制器
在识别和验证所有关键参数后,我们的PMSM工厂模型已准备好用于电机控制器的开发。我们使用Simu万博1manbetxlink设计优化来调整控制器外环的比例和积分增益,速度调节器。我们运行闭环模拟以验证控制器模型的功能,并使用Simulink编码器从模型生成代码,我们部署到XPC目标交钥匙实时目标机器。万博1manbetx
作为最终控制器验证步骤,我们使用XPC目标交钥匙实时系统上的已部署的控制器代码进行Simulink和硬件测试中的步入响应和海岸仿真。万博1manbetx我们比较了转子速度和相电流的模拟和硬件测试结果,并再次在模型和硬件之间找到了密切的协议,在两种情况下,NRMSD低于2%(图9)。
总结
PMSM植物模型的开发强调了两个参数识别测试。通过传感器获取数据,用于海岸下降测试,并通过示波器进行仪器控制工具箱,用于直流电压步骤测试。我们通过曲线拟合提取数据,以实现DC电压步骤测试的海岸下降测试和参数估计。我们通过将模拟结果与测量的测试数据进行比较来验证所有参数值,这使我们能够生产我们可以信任的工厂模型,因为我们开发并调整控制器。
所有这项工作都可以在开发过程中提早完成,良好的是在嵌入式代码为控制系统生成,使工程师能够在硬件测试开始之前找到和消除要求和设计的问题。这些益处通常远远超过了与创建工厂模型相关的成本,特别是如果模型可以在其他项目中重复使用。
我们想承认密歇根大学Heath Hofmann教授的贡献,他推荐了用于表征PMSM的测试程序,并允许我们使用他的实验室设施进行本项目的初始阶段。