6个自由度
在模拟中实现六自由度运动方程,使用欧拉角和四元数表示
建立和模拟固定或变质量大气飞行器的点质量和六自由度动力学。定义身体、风和地球中心、地球固定(ECEF)坐标系中运动方程的表示形式。在坐标系统之间转换并执行单元转换以确保模型的一致性。
块
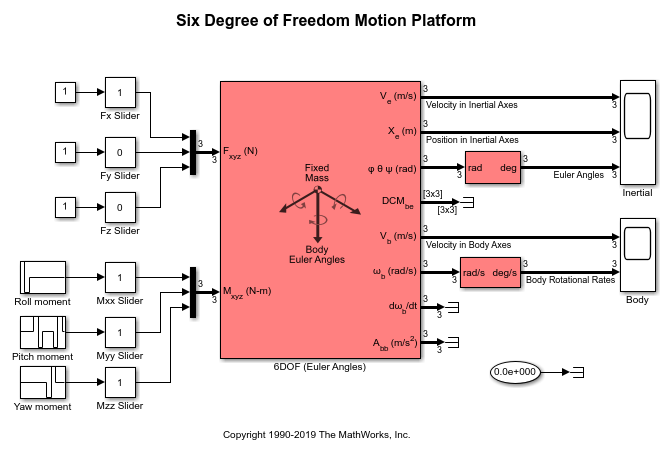
| 6DOF(欧拉角) | 实现六自由度运动方程的欧拉角表示 |
| 6自由度(四元数) | 实现四元数表示的六自由度运动方程相对于身体轴 |
| 六自由度ECEF(四元数) | 实现了六自由度运动方程在地心固定地球(ECEF)坐标下的四元数表示 |
| 六自由度风(四元数) | 实现关于风轴的六自由度运动方程的四元数表示 |
| 6自由度风(风角) | 实现六自由度运动方程的风角表示 |
| 自定义变质量6DOF(欧拉角) | 实现自定义变质量六自由度运动方程的欧拉角表示 |
| 自定义可变质量6DOF(四元数) | 实现自定义变质量相对于体轴的六自由度运动方程的四元数表示 |
| 自定义可变质量6DOF ECEF(四元数) | 实现了自定义变质量六自由度运动方程在地心固定地球坐标下的四元数表示 |
| 自定义可变质量6自由度风(四元数) | 实现自定义变质量相对于风轴的六自由度运动方程的四元数表示 |
| 自定义可变质量6自由度风(风角) | 实现自定义变质量六自由度运动方程的风角表示 |
| 简单变质量6DOF(欧拉角) | 实现了六自由度变质量运动方程的欧拉角表示 |
| 简单变质量6DOF(四元数) | 实现简单变质量相对于体轴的六自由度运动方程的四元数表示 |
| 简单变质量6DOF ECEF(四元数) | 实现了简单变质量六自由度运动方程在地心固定地球坐标下的四元数表示 |
| 简单变质量六自由度风(四元数) | 实现单变质量相对于风轴的六自由度运动方程的四元数表示 |
| 简单变质量6自由度风(风角) | 实现了六自由度单变质量运动方程的风角表示 |
主题
- 关于航空航天坐标系
定义坐标系统来表示飞机和航天器的运动。
特色的例子
您也可以从以下列表中选择一个网站: