文件I / O
汽车从外部数据源的数据读取和可视化
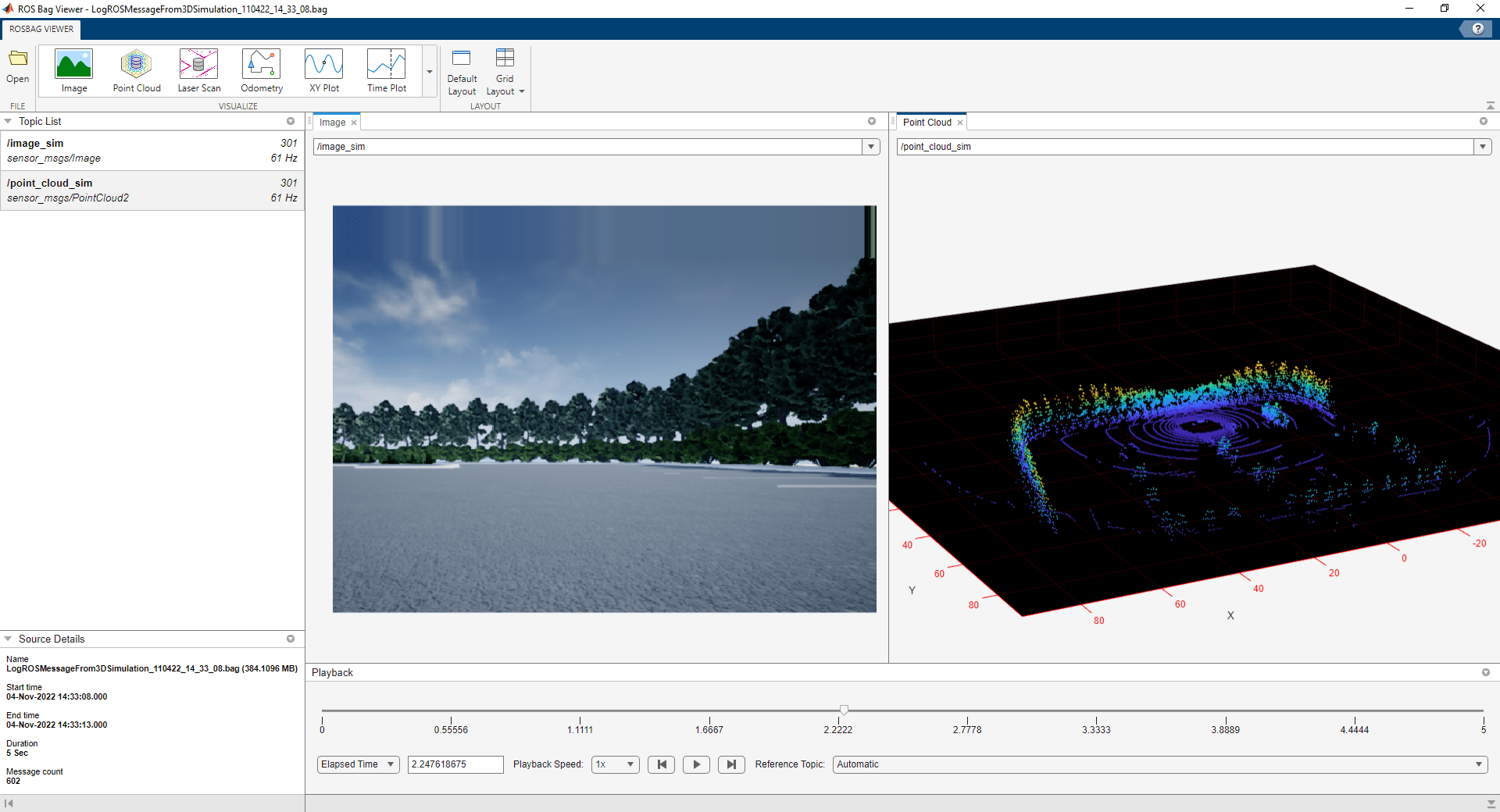
自动驾驶工具箱™提供了一些特性来阅读和可视化汽车来自各种第三方的数据文件。有各种各样的文件格式,将汽车数据存储在不同的格式。汽车数据包括来自传感器的数据,如激光雷达,艾莫斯,摄像头以及车辆状态信息,可以消息和任何其他定制的测量。
调速发电机®激光雷达点云数据存储在包捕获(PCAP)文件。点云也存储在厚度或PCD文件。Ibeo®传感器,它是由Ibeo汽车®系统,创建Ibeo数据容器文件可以包含数据同时对多个传感器,如IMU, GPS,相机和激光雷达。ADTF(汽车数据和Time-Triggered框架)是一种数据格式由Elelktrobit同时从多个汽车传感器还可以存储数据。高清生活地图(这里HDLM)是一个web服务,它提供了自动驾驶高清地图数据的应用程序。
自动驾驶的工具箱支持阅读和可视化数据从所有上面的文件万博1manbetx格式。其他的文件格式可能需要额外的工具箱许可证。
功能
主题
- 从IDC文件读取传感器消息
从Ibeo IDC读取传感器数据文件到MATLAB®工作区。
- 阅读和可视化高清实时地图数据
阅读和高度精确的地图数据的可视化与自动驾驶应用程序使用。