交互式地从响应数据估计植物参数
这个例子展示了如何使用PID调谐器拟合一个线性模型,以测量SISO响应数据。
如果您有系统识别工具箱™软件,您可以使用PID调谐器根据系统所测得的时域响应数据来估计线性植物模型的参数。PID调谐器然后为得到的估计模型调整PID控制器。PID调谐器提供几种技术,以图形化、手动或自动调整估计模型,以匹配您的响应数据。这个例子说明了其中的一些技巧。
在本例中,将测量到的响应数据从数据文件加载到MATLAB中®工作区你将植物作为一个线性时不变模型.有关从Simulink生成模拟数据的信息万博1manbetx®模型中,看到交互式地从测量或模拟响应数据估计植物(万博1manbetx仿真软件控制设计).
导入识别响应数据
开放PID调谐器并将负载测量的响应数据输入MATLAB工作空间。
pidTuner (tf (1),“π”)加载PIDPlantMeasuredIOData
当您导入响应数据时,PID调谐器假设你的测量数据代表一个在负反馈回路中连接到PID控制器的植物。换句话说,PID调谐器假设您的系统具有以下结构。PID调谐器假设您在植物输入端注入了一个步进信号
u测量了系统的响应y,如图所示。
本例的示例数据文件包含三个变量,每个变量都是501-by-1数组。
inputu是否注入单位阶跃函数u获取响应数据。outputy系统的测量响应是在y.向量的时间t,从0到50秒,采样时间0.1秒。比较inputu来t表明该步骤发生在t= 5 s。提示
您可以导入存储为数字数组(如本例所示)的响应数据
timeseries对象,或一个iddata(系统辨识工具箱)对象。在PID调谐器,在植物菜单中,选择
确定新工厂.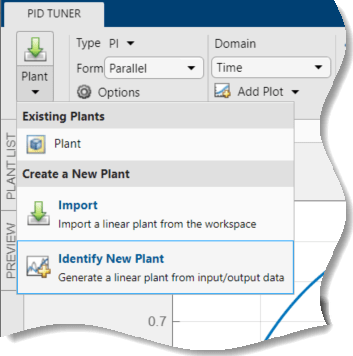
在植物鉴别选项卡上,单击
 得到的I / O数据并选择阶跃响应.此操作将打开进口的阶跃响应对话框。
得到的I / O数据并选择阶跃响应.此操作将打开进口的阶跃响应对话框。输入有关响应数据的信息。输出信号是测量到的系统响应,
outputy.输入的阶跃信号如对话框中的图所示进行参数化。这里,输入5为出现滞后,0.1为样品时间.然后,单击 进口.
进口.
的植物鉴别图显示了响应数据和一个初步估计的植物的响应。





数据进行预处理
根据响应数据的质量和特性,您可能需要对数据执行一些预处理,以改进估计的工厂结果。PID调谐器为预处理响应数据提供多个选项,例如删除偏移量、过滤或提取数据的子集。在本例中,响应数据有一个偏移量。数据偏移量的去除对良好的识别结果至关重要。使用进行预处理菜单上这样做。(有关其他数据预处理选项的信息,请参见数据进行预处理.)
在植物鉴别选项卡上,单击
 进行预处理并选择
进行预处理并选择删除抵消.的删除抵消选项卡打开,显示响应数据和相应输入信号的时间图。选择消除信号偏移选择响应,
产量(y).在抵消删除文本框中,指定值为2.您还可以选择信号初值或信号均值,或输入数值。plot用附加的轨迹更新,显示应用偏移量的信号。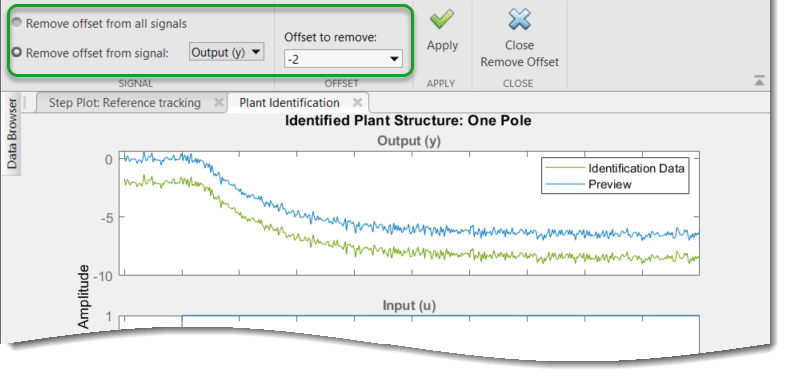
点击
 应用保存对信号的改变。点击
应用保存对信号的改变。点击 关闭删除抵消回到植物鉴别选项卡。
关闭删除抵消回到植物鉴别选项卡。PID调谐器根据预处理的响应信号自动调整植物参数,为植物创建一个新的初始猜测。

调整设备结构和参数
PID调谐器允许您指定一个植物结构,例如一个极,欠阻尼的一对,或状态空间模型.在结构菜单,选择最适合你的反应的植物结构。您还可以向工厂添加传输延迟、零或积分器。对于这个例子,单极结构给出了定性正确的响应。您可以进一步调整设备结构和参数值,使估计的系统响应与测量的响应数据更好地匹配。
PID调谐器给你几种方法来调整植物参数:
通过拖动绘图上的调节器,以图形方式调整估计系统的响应。在本例中,拖动红色
x调整预估的工厂时间常数。PID调谐器重新计算系统参数。当你改变估计的系统响应时,很明显在阶跃输入的应用之间存在一些时间延迟t= 5s,以及系统对该阶跃输入的响应。
将传输延迟添加到估计的工厂模型中,在植物的结构部分,检查延迟.图上出现一条垂直线,表示延迟的当前值。向左或向右拖动线以改变延迟,并通过拖动红色线进一步调整系统响应
x.调整系统参数的数值,如增益、时间常数和时间延迟。单击,对系统参数进行数值调整
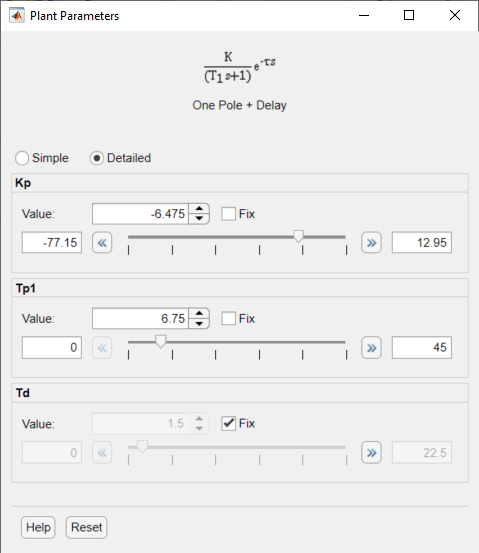
 编辑参数.
编辑参数.假设您从一个独立的测量得知系统中的传输延迟是1.5秒。在设备参数对话框,输入1.5τ.检查修复来修复参数值。当你检查修复对于一个参数,无论是图形化还是对估计的植物模型的自动调整都不会影响该参数值。
自动优化系统参数以匹配测量的响应数据。点击
 汽车估计用当前值作为初始估计值来更新估计的系统参数。
汽车估计用当前值作为初始估计值来更新估计的系统参数。


您可以使用这些方法中的任何一种继续迭代,以调整植物结构和参数值,直到估计系统的响应与测量的响应充分匹配。
保存植物和调整PID控制器
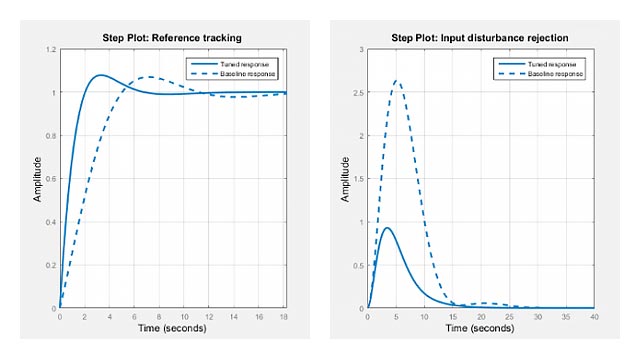
当你对合身满意时,点击![]() 应用.这样做可以挽救估计中的工厂,
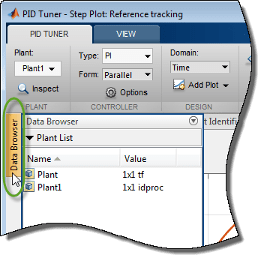
应用.这样做可以挽救估计中的工厂,Plant1,PID调谐器工作区。PID调谐器自动设计PI控制器Plant1而且,在步骤图:参考跟踪Plot,显示一个新的闭环响应。的植物菜单反映了Plant1为当前控制器设计选择。

提示
检查存储在PID调谐器工作空间,打开数据浏览器.
你现在可以使用PID调谐器为估计的工厂改进控制器设计和检查调谐系统响应的工具。
还可以将标识的植物从PID调谐器工作空间以MATLAB工作空间进行进一步分析。在PID调谐器选项卡上,单击![]() 出口.检查您想要导出到MATLAB工作区的植物模型。对于本例,导出
出口.检查您想要导出到MATLAB工作区的植物模型。对于本例,导出Plant1,你从响应数据中识别出的植物。也可以导出调谐的PID控制器。点击![]() 好吧.您选择的模型被保存到MATLAB工作区中。
好吧.您选择的模型被保存到MATLAB工作区中。
已识别的植物模型保存为已识别的LTI模型,例如idproc(系统辨识工具箱)或中的难点(系统辨识工具箱).
提示
或者,右键单击数据浏览器选择它进行调优或将其导出到MATLAB工作区。

相关主题
你也可以从以下列表中选择一个网站: