使用强化学习调节PI控制器
这个例子展示了如何使用双延迟深度确定性策略梯度(TD3)强化学习算法来调整PI控制器。将调谐控制器的性能与用该方法调谐的控制器的性能进行了比较控制系统调谐器应用程序。使用控制系统调谐器应用程序在Simulink®中调优控制器需要Simul万博1manbetxink Control Design™软件。
对于具有少量可调参数的相对简单的控制任务,基于模型的调优技术与基于模型的rl方法相比,可以获得较好的效果,且调优过程更快。然而,RL方法更适合于高度非线性系统或自适应控制器整定。
为了便于控制器比较,两种调谐方法都使用线性二次高斯(LQG)目标函数。
这个例子使用了一个强化学习(RL)代理来计算PI控制器的增益。关于用神经网络控制器代替PI控制器的例子,请参见创建Simul万博1manbetxink环境并训练Agent.
环境模型
本例中的环境模型是水箱模型。该控制系统的目标是保持水箱中的水位与参考值相匹配。
开放式系统(“watertankLQG”)

该模型包含带方差的过程噪声 .
在尽量减少控制的同时保持水位U,此示例中的控制器使用以下LQG标准。
要在此模型中模拟控制器,必须指定模拟时间Tf控制器采样时间Ts几秒钟之内。
Ts=0.1;Tf=10;
有关水箱型号的更多信息,请参见水箱Simulink万博1manbetx模型(万博1manbetxSimulink控制设计).
使用控制系统调谐器调整PI控制器
使用在Simulink中调整控制器的步骤万博1manbetx控制系统调谐器,必须将控制器块指定为优化块,并定义优化过程的目标。有关使用控制系统调谐器看见使用控制系统调谐器调整控制系统(万博1manbetxSimulink控制设计).
对于本例,请打开保存的会话ControlSystemTunerSession.mat使用控制系统调谐器.中的PID Controller块watertankLQG模型作为调优块,并包含一个LQG调优目标。
控制系统调谐器(“ControlSystemTunerSession”)
调整控制器,在调谐选项卡,单击曲调.
调谐的比例增益和积分增益分别约为9.8和1e-6。
Kp_CST=9.801999804512;Ki_CST=1.00019996230706e-06;
为培训代理创造环境
为了定义训练RL agent的模型,请按照以下步骤修改水箱模型。
删除PID控制器。
插入RL Agent块。
创建观测向量 在哪里 , 是油箱的高度,以及 是参考高度。将观察信号连接到RL代理块。
将RL代理的奖励函数定义为消极的在LQG成本中,也就是, .RL代理将此奖励最大化,从而最小化LQG成本。
由此产生的模型是rlwatertankPIDTune.slx.
mdl=“rlwatertankPIDTune”;open_system (mdl)

创建环境接口对象。要做到这一点,使用localCreatePIDEnv函数的定义。
[env, obsInfo actInfo] = localCreatePIDEnv (mdl);
提取此环境的观察和行动维度。
numObservations=obsInfo.Dimension(1);数量=产品(活动尺寸);
修复随机生成器种子以获得再现性。
rng (0)
创建TD3代理
给定观察结果,TD3代理使用参与者表示来决定要执行的操作。要创建参与者,请首先使用观察输入和操作输出创建一个深度神经网络。有关更多信息,请参阅决定论呈现.
您可以将PI控制器建模为一个神经网络,其中有一个完全连接的层,具有误差和误差积分观测值。
在这里:
U是actor神经网络的输出。Kp和Ki为神经网络权值的绝对值。, 是油箱的高度,以及 为参考高度。
梯度下降优化可以使权重为负值。为避免负权重,请替换正常权重完全连接层用一个完全连接的Pilayer。此层通过实现函数确保权重为正
.这个层定义在完全连接的Pilayer.m.
initialGain = single([1e- 32 2]); / /初始化actorNetwork = [featureInputLayer(numobobservations,“正常化”,“没有”,“姓名”,“状态”) fullyConnectedPILayer (initialGain“行动”)];actorOptions=rlRepresentationOptions(“LearnRate”1 e - 3,“梯度阈值”1);演员= rlDeterministicActorRepresentation (actorNetwork obsInfo actInfo,...“观察”, {“状态”},“行动”, {“行动”},动植物);
TD3代理使用两种批判价值-功能表示来近似给定观察和行动的长期奖励。要创建批评家,首先要创建一个深度神经网络,它有两个输入,一个是观察和行动,一个是输出。有关创建深度神经网络值函数表示的更多信息,请参见创建策略和值函数表示.
要创建批评者,请使用localCreateCriticNetwork本例末尾定义的函数。对两种表示使用相同的网络结构。
criticNetwork = localCreateCriticNetwork (numObservations numActions);criticOpts = rlRepresentationOptions (“LearnRate”1 e - 3,“梯度阈值”,1);临界C1=rlQValueRepresentation(临界网络、obsInfo、actInfo、,...“观察”,“状态”,“行动”,“行动”,criticOpts);critic2=rlQValueRepresentation(criticNetwork、obsInfo、actInfo、,...“观察”,“状态”,“行动”,“行动”,criticOpts);批评家=[critic1 critic2];
使用以下选项配置代理。
将代理设置为使用控制器采样时间
Ts.将小批量大小设置为128个经验样本。
将体验缓冲区长度设置为1e6。
将探索模型和目标策略平滑模型设置为使用方差为0.1的高斯噪声。
使用指定TD3代理选项rlTD3AgentOptions.
agentOpts = rlTD3AgentOptions (...“采样时间”Ts,...“MiniBatchSize”, 128,...“经验缓冲长度”1 e6);agentOpts.ExplorationModel.Variance = 0.1;agentOpts.TargetPolicySmoothModel.Variance = 0.1;
使用指定的参与者表示、评论家表示和代理选项创建TD3代理。有关详细信息,请参阅rlTD3AgentOptions.
代理= rlTD3Agent(演员、评论家、agentOpts);
列车员
要培训代理,请首先指定以下培训选项。
每次训练最多跑一次
1000每集最多1集00时间步长。在章节管理器中显示培训进度(设置
阴谋选项)并禁用命令行显示(设置冗长的选项)。当代理连续100集获得的平均累积奖励超过-355时,停止训练。此时,代理可以控制水箱中的水位。
有关详细信息,请参阅RL培训选项.
最大事件数=1000;最大步骤数=ceil(Tf/Ts);训练选项数=RL训练选项(...“最大集”maxepisodes,...“MaxStepsPerEpisode”,maxsteps,...“ScoreAveragingWindowLength”,100,...“冗长”假的,...“情节”,“训练进步”,...“停止培训标准”,“平均向上”,...“StopTrainingValue”,-355);
训练代理人使用火车函数。培训此代理是一个计算密集型过程,需要几分钟才能完成。要在运行此示例时节省时间,请通过设置溺爱到错误的.自己训练代理人,设置溺爱到真正的.
doTraining = false;如果溺爱%培训代理人。trainingStats=列车(代理人、环境、列车员);其他的%为示例加载预训练代理。负载(“WaterTankPIDtd3.mat”,“代理人”)终止

验证训练有素的代理
通过仿真验证了该模型的有效性。
simOpts=rlSimulationOptions(“MaxSteps”, maxsteps);经验= sim (env,代理,simOpts);
PI控制器的积分增益和比例增益是参与者表示的绝对权重。要获得权重,首先从参与者中提取可学习的参数。
actor=getActor(代理);parameters=getLearnableParameters(actor);
获取控制器增益。
Ki = abs(参数{1}(1))
Ki =单0.3958
Kp = abs(参数{1}(2))
金伯利进程=单8.0822
将从RL代理获得的增益应用于原始PI控制器块,并运行阶跃响应模拟。
mdlTest=“watertankLQG”;open_system (mdlTest);set_param ([mdlTest“/PID控制器”],“P”,num2str(Kp))设置参数([mdlTest“/PID控制器”],“我很高兴,num2str(Ki))sim(mdlTest)
提取阶跃响应信息、LQG成本和模拟的稳定裕度localStabilityAnalysis函数的定义。
rlStep=simout;成本=成本;rlStabilityMargin=局部稳定性分析(mdlTest);
应用通过以下方式获得的收益:控制系统调谐器,并运行阶跃响应仿真。
set_param ([mdlTest“/PID控制器”],“P”num2str (Kp_CST) set_param ([mdlTest“/PID控制器”],“我很高兴,num2str(Ki_CST)) sim(mdlTest) cstStep = simout;cstCost =成本;cstStabilityMargin = localStabilityAnalysis (mdlTest);
比较控制器性能
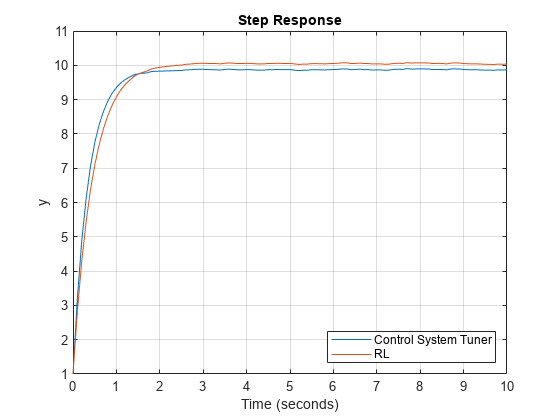
绘制每个系统的阶跃响应。
图1:图(CST步骤)保持在绘图(rlStep)网格在传奇(“控制系统调谐器”,“RL”,“位置”,‘东南’)头衔(“阶跃响应”)
分析两种仿真的阶跃响应。
rlStepInfo = stepinfo (rlStep.Data rlStep.Time);cstStepInfo = stepinfo (cstStep.Data cstStep.Time);stepInfoTable = struct2table([cstStepInfo rlStepInfo]);stepInfoTable = removevars (stepInfoTable, {...“定居民”,“结算Max”,“下冲”,“PeakTime”});stepInfoTable.Properties.RowNames={“控制系统调谐器”,“RL”}步骤信息表
stepInfoTable =2×5表上升时间瞬变时间沉降时间超调峰值(uuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuuu控制系统调谐器0.77737 1.3594 1.3278 0.33125 9.9023 RL0.24 1.708.077
分析两种模拟的稳定性。
stabilityMarginTable=struct2table([cstStabilityMargin rlStabilityMargin]);stabilityMarginTable=移除变量(stabilityMarginTable{...“GMF频率”,“PMF频率”,“延迟保证金”,“DMFrequency”});stabilityMarginTable.Properties.RowNames={“控制系统调谐器”,“RL”};稳定表
稳定表=2×3表控制系统调谐器8.1616 84.124真RL 9.9226 84.242真
比较两个控制器的累积LQG成本。RL调谐控制器产生稍微更优的解决方案。
rlCumulativeCost=总和(rlCost.Data)
rlCumulativeCost = -375.9135
cstCumulativeCost=总和(cstCost.Data)
cstCumulativeCost=-376.9373
两个控制器都产生稳定的响应,控制器使用控制系统调谐器产生更快的响应。然而,RL调谐方法产生更高的增益裕度和更优的解决方案。
局部函数
功能创建水箱RL环境。
函数[env,obsInfo,actInfo]=localCreatePIDEnv(mdl)%定义观察规范obsInfo和行动规范actInfo。obsInfo=rlNumericSpec([2 1]);obsInfo.Name=“观察”; obsInfo.Description=“集成错误和错误”;actInfo = rlNumericSpec([1 1]);actInfo。Name =“PID输出”;%构建环境接口对象。env=rlSi万博1manbetxmulinkEnv(mdl,[mdl“/RL代理”],obsInfo,actInfo);%设置一个自定义重置函数,随机化模型的参考值。env。ResetFcn = @(在)localResetFcn (, mdl);终止
函数随机参考信号和初始高度的水箱在每集开始。
函数in=localResetFcn(in,mdl)%随机参考信号blk=sprintf([mdl' /期望\ nWater水平']); hRef=10+4*(rand-0.5);in=设定锁定参数(in,blk,“价值”,num2str(hRef));%随机化初始高度hInit = 0;黑色= [mdl“/水箱系统/H”];在= setBlockParameter(黑色,“InitialCondition”num2str (hInit));终止
函数用于线性化和计算SISO水箱系统的稳定裕度。
函数保证金=本地稳定性分析(mdl)io(1)=linio([mdl' / Sum1 '), 1“输入”);io(2)=linio([mdl“/水箱系统”), 1“openoutput”);op=操作点(mdl);op.时间=5;linsys=线性化(mdl,io,op);余量=所有余量(linsys);终止
功能创建评论网络。
函数statePath = [featureInputLayer(numObservations, numActions),“正常化”,“没有”,“姓名”,“状态”)完全连接层(32,“姓名”,“fc1”)];actionPath=[featureInputLayer(numActions,“正常化”,“没有”,“姓名”,“行动”)完全连接层(32,“姓名”,“取得”)]; commonPath=[连接层(1,2,“姓名”,“concat”)雷卢耶(“姓名”,“重新注册1”)完全连接层(32,“姓名”,“fcBody”)雷卢耶(“姓名”,“reluBody2”)完全连接层(1,“姓名”,“qvalue”));criticNetwork = layerGraph ();criticNetwork = addLayers (criticNetwork statePath);criticNetwork = addLayers (criticNetwork actionPath);criticNetwork = addLayers (criticNetwork commonPath);criticNetwork = connectLayers (criticNetwork,“fc1”,“concat/in1”);criticNetwork = connectLayers (criticNetwork,“取得”,“concat/in2”);终止
另见
相关的话题
你也可以从以下列表中选择一个网站:
