使用外部模式控制运行时在运行时控制鹦鹉迷你络的电机速度
此示例显示了如何在运行时使用Simulink®中使用Simulink®的外部模式功能进行静脉内®迷你克隆的电机速度控制。万博1manbetx
介绍
万博1manbetxSimulink的外部模式功能可在模型在目标硬件上运行时进行参数调整,而无需停止模型。当您在Simulink中更改参数值时,修改后的参数值将传送到目标硬件。可通过查看目标硬件上的信号来监控参数调整活动的效果在Simulink中处理或显示。
在本例中,您将学习如何配置Simulink模型,以便在Parrot minidrone上以外部模式运行万博1manbetx模拟,并在运行时控制电机的速度。
先决条件
需要硬件
要运行此示例,您需要以下硬件:
鹦鹉滚动蜘蛛或鹦鹉Mambo Minidrone,带有充满电的电池和螺旋桨
Micro USB Type-B电缆
蓝牙低能量(BLE)4.0支持万博1manbetx
任务1-查看模型并设置外部模式
在此任务中,您将打开Simulink模型并设置外部模式功能。万博1manbetx
1。如上所述将PARROT MINIDRONE连接到计算机旋转鹦鹉微型无人机的马达,而不让其飞行。你可以参考设置和配置记录在通过蓝牙将minidrone连接到主机时遇到的任何问题。
2。打开外部模式模型。
开放式系统('parrot_external_mode');

此模型已为配置鹦鹉滚动蜘蛛目标。要了解如何为Parrot Minidrone设置模型,请参阅旋转鹦鹉微型无人机的马达,而不让其飞行。
3.去硬件标签并选择监控和曲调启动外部模式。

模型构建成功完成后,模型等待来自MATLAB的start命令,以开始在无人机上执行代码。可以看出,Simulink模型中的时间在0s处冻结,如下图所示。万博1manbetx

任务2 - 启动无人机并控制电机的速度
在此任务中,您可以在外部模式下启动Parrot Minidrone电机,更改Simulink中的参数值,并实时查看电机的速度变化。万博1manbetx
1。打开鹦鹉飞行控制界面:
如果你选择了构建后自动启动鹦鹉飞行控制界面“配置参数”对话框中的选项(硬件实现窗格>目标硬件资源>构建选项),鹦鹉飞行控制UI在构建成功后自动打开。
您还可以从命令行打开鹦鹉飞行控制接口
要了解更多关于Parrot飞行界面的信息,请访问此部分。
2。在鹦鹉飞行控制界面中,根据需要设置功率增益和飞行时间。
3.点击开始。
接收到启动命令后,电机开始旋转,并且Simulink模型在外部模式下运行。万博1manbetx可以看出,时间开始在Simulink模型上运行。万博1manbetx
4。打开飞行控制系统子系统。
5。这加速电机子系统采用加速度计值,并根据无人机的方向旋转电机的特定组合。例如,所有四个电动机在无人机保持在平坦表面上时旋转。
尝试将无人机垂直向右倾斜 。您可以观察到这种情况下的第1电机旋转。
。您可以观察到这种情况下的第1电机旋转。
6。当模型在外部模式下运行时,打开范围。
7。使用的电机速度改变滑块并注意电机速度的变化。
8。点击停止在飞行控制界面中,以停止外部模式仿真。
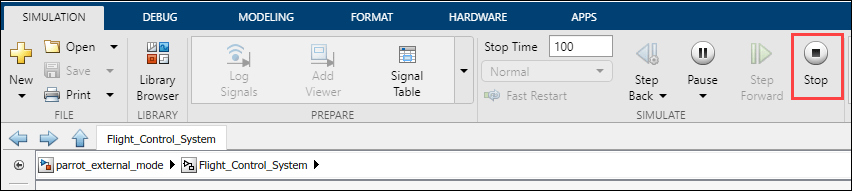
停止外部模式模拟将终止Parrot Minidrone上运行的代码。在开始另一个外部模式模拟之前,需要通过单击跑Simulink窗口的工具栏上的图标。万博1manbetx
您还可以从以下列表中选择网站: