undistortFisheyeImage
正确的鱼眼镜头畸变的图像
语法
描述
例子
正确的鱼眼镜头畸变的图像
删除从鱼眼镜头畸变图像通过检测挡板校准模式和校准相机。然后,显示结果。
收集一套棋盘校准图片。
图像= imageDatastore (“calibrationImages”);
检测图像的校准模式。“PartialDetections”名称默认参数设置为true允许检测部分的棋盘格。
[imagePoints, boardSize] = detectCheckerboardPoints (images.Files,“HighDistortion”,真正的);
生成的世界坐标角落棋盘方格。
squareSize = 20;%毫米worldPoints = generateCheckerboardPoints (boardSize squareSize);
估计鱼眼相机标定参数基于图像和世界点。使用第一个图像图像大小。
I = readimage(图片,10);图象尺寸=[(我,1)大小(我,2)];params = estimateFisheyeParameters (imagePoints worldPoints图象尺寸);
除去第一透镜畸变图像我并显示结果。
j - 1 = undistortFisheyeImage(我params.Intrinsics);图imshowpair (I, j - 1,“蒙太奇”)标题(“原始图像(左)与校正图像(右))J2 = undistortFisheyeImage (params.Intrinsics,我“OutputView”,“相同”,“ScaleFactor”,0.2);图imshow (J2)
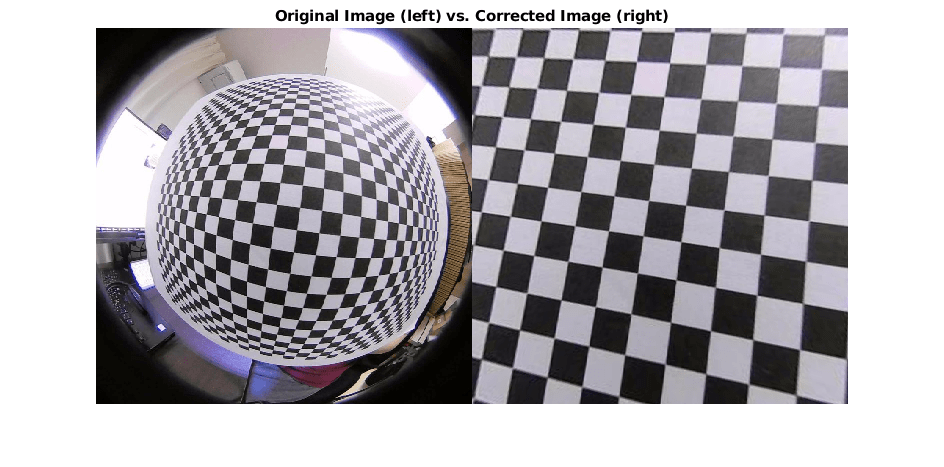
标题(输出视图缩放系数较低的)

输入参数
输出参数
提示
计算机视觉工具箱™校准Scaramuzza提出的算法使用鱼眼相机模型[1]。
引用
[1]Scaramuzza D。,A. Martinelli, and R. Siegwart. "A Toolbox for Easy Calibrating Omnidirectional Cameras."智能机器人和IEEE国际会议系统,(——)。中国,北京,2006年10月7 - 15,。
版本历史
介绍了R2017b