@George
,
你写的:
x_new = x_prev + u0x *我+ 0.5 * ax * (i ^ 2);
这是不正确的,因为你如何定义变量。你把我定义为当前时间。xprev更新在每个内循环通过。因此你应该使用dt,步长,而不是我=时间,这更新的步骤。你的方程y_new有相同的问题。
检查内部循环代码识别计算,可以拉到外循环,也就是说,任何东西都是一样的在每一个内部循环。
我将使用NxM数组X, Y,韦尔,等等,其中N =长度(时间)和M =数量的角度。
我将改变循环变量的整数并使用它们作为数组索引x (I, j)和y (I, j),你会填满你的循环。
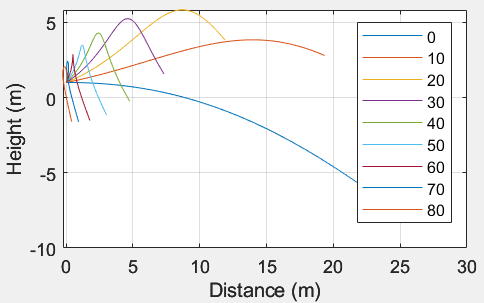
这是一个简单的例子为一个球推出了不同的角度。系统要复杂得多,所以你的方程ax, ay会有所不同。
dt = . 01;%时间步(s)
时间= 0:dt: 2;%时间不是循环中使用,但你可以用它来阴谋(t) x (:, j)),等等
角= 0:10:80;
N =长度(时间);M =长度(角);
g = -9.8;% y accel m / s ^ 2
x = 0 (N, M);y = 0 (N, M);%分配数组x, y
x(1:) = 0(1米);%初始距离(米)
y(1:) =(1米)的;%初始高度(米)
v0 = 14;%初始veloc(米/秒)
为j = 1: M
vx = v0 * cos(角(j) *π/ 180);
v = v0 * sin(角(j) *π/ 180);
ax = 0;%不x加速我的简单的模型
唉= g;% y加速度
为我= 2:N
(i, j) = x(张,j) + dt * vx;
y (i, j) = max (y(张,j) + dt * v, 0);%不允许y < 0
vx = vx + dt * ax;%更新vx
v = v + dt * ay;%更新v
结束
情节(x (:, j), y (:, j))
持有在
legstr {j} = num2str(角(j));
结束
传奇(legstr);网格在;
包含(“距离(m)”);ylabel (身高(米)的);

给你一些想法。