探索混合动力电动汽车P2参考应用
混合动力电动汽车(HEV)P2参考应用程序代表一个完整的HEV模型,包括内燃机、变速箱、蓄电池、电机和相关的动力传动系统控制算法。将参考应用程序用于HEV P2混合动力车的硬件在环(HIL)测试、权衡分析和控制参数优化。要创建并打开引用应用程序项目的工作副本,请输入
默认情况下,HEV P2参考应用程序配置如下:锂离子电池组
映射的电动马达
映射的火花点火(SI)发动机
这张图显示了动力系统的配置。

该表描述了参考应用程序中的块和子系统,指出哪些子系统包含变体。为了实现模型变体,参考应用程序使用变体子系统。
| 参考应用程序元素 | 描述 | 变体 |
|---|---|---|
分析功率和能量 |
双击分析功率和能量打开现场脚本。运行该脚本以评估和报告组件级和系统级的功耗和能源消耗。有关Live脚本的更多信息,请参阅分析功率和能量. |
NA |
驱动循环来源块 - FTP75(2474秒) |
生成标准或用户指定的驱动循环速度与时间配置文件。块输出是所选或指定的车辆纵向速度。 |
✓ |
环境子系统 |
创建环境变量,包括道路坡度、风速以及大气温度和压力。 |
|
纵向驱动程序子系统 |
使用纵向驱动程序或打开循环变量,以产生归一化加速度和制动命令。
|
✓ |
控制器子系统 |
实现包含P2混合控制模块(HCM)、发动机控制模块(ECM)和变速器控制模块(TCM)的动力总成控制模块(PCM)。 |
✓ |
乘用车子系统 |
实现一个混合乘用车,包含动力传动系统,电厂和发动机子系统。 |
✓ |
形象化子系统 |
显示车辆级性能、蓄电池荷电状态(SOC)、燃油经济性和排放结果,这些结果对动力传动系统匹配和部件选择分析非常有用。 |
评估和报告权力和能量
双击分析功率和能量打开现场脚本。运行该脚本以评估和报告组件级和系统级的功耗和能源消耗。有关Live脚本的更多信息,请参阅分析功率和能量.
该脚本提供:
您可以导出到Excel中的总体能源摘要®电子表格。
发动机厂,电厂和动力传动装置效率,包括在不同发动机厂效率下花费的发动机直方图。
数据记录,以便您可以使用仿真数据检查器来分析动力系统效率和能量传输信号。
有关Live脚本的更多信息,请参阅分析功率和能量.
驱动循环来源
这个驱动循环来源块生成选定或指定的驾驶周期的目标车辆速度。参考应用程序有这些选项。
| 时机 | 变体 | 描述 |
|---|---|---|
输出样本的时间 |
|
连续操作命令 |
|
离散运营商命令 |
纵向驱动程序
这个纵向驱动程序子系统生成归一化加速度和制动命令。参考应用程序具有这些变体。
块变体 |
描述 | ||
|---|---|---|---|
纵向驱动(默认) |
控制 |
|
PI控制,跟踪结束和前馈增益是车速的函数。 |
|
最佳单点预览(前视)控制。 |
||
|
具有跟踪结束和前馈增益的比例积分(PI)控制。 |
||
低通滤波器(LPF) |
|
使用LPF对目标速度误差进行更平滑的驾驶。 |
|
|
请勿在速度错误上使用过滤器。 |
||
移位 |
|
状态流®图表模型反向,中性和驱动换档调度。 |
|
|
输入档,车辆状态和速度反馈产生加速度和制动命令,以跟踪前向和反向车辆运动。 |
||
|
没有传播。 |
||
|
状态流程图模型倒挡、空挡、停车和n速档位调度。 |
||
开环 |
开环控制子系统。在子系统中,您可以使用恒定或基于信号的输入配置加速、减速、档位和离合器命令。 |
||
为了在带踏板命令移动车辆之前,在驱动周期开始并模拟催化剂灯光的开始处空闲发动机,请使用纵向驱动器变体。纵向驱动器子系统包括点火开关信号曲线,IgSw. 发动机控制器使用点火开关信号启动发动机和催化剂点火计时器。
当催化剂点火定时器计数时,催化剂点火定时器覆盖引擎停止-启动(ESS)停止功能控制。在模拟过程中,经过IgSw下沿时间达到催化剂起燃时间CatLightOffTime, ESS恢复正常操作。如果在仿真到达之前没有扭矩命令停止时间,ESS关闭发动机。
控制ESS和催化剂熄灭:
在纵向驱动器模型子系统中,设置点火开关配置文件
IgSw“在'。
在发动机控制器模型工作空间中,设置以下校准参数:
EngStopStartEnable——使ESS。关闭ESS时,设置为false。CatLightOffTime-从发动机起动到催化剂点火的发动机怠速时间。停止时间-驾驶员模型扭矩请求切断后ESS发动机运行时间。

控制器
这个控制器子系统具有包含ECM,HCM和TCM的PCM。控制器具有这些变体。
| 控制器 | 变体 | 描述 | |
|---|---|---|---|
| ECM | Sienginecontroller.(默认) |
实现了SI控制器 |
|
CiEngineController |
实现了CI控制器 |
||
| 中医 |
|
实现传输控制器 |
|
| HCM. |
|
能源管理系统 |
实现了等效消耗最小化策略 |
基于规则的控制 |
P2监控 |
实现一个动态监控控制器,用于确定发动机扭矩、电机扭矩、起动机、离合器和制动器压力命令。 |
|
回复制动控制 |
在基于规则的控制期间实现平行或串联再生制动控制器。 |
||
基于规则的控制
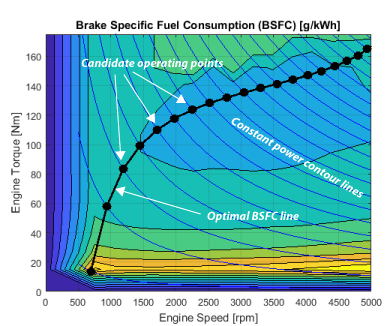
HCM实现了一种动态监控控制器,用于确定发动机扭矩,电动机扭矩,起动器,离合器和制动压力指令。具体而言,HCM:
将驱动程序加速器踏板信号转换为扭矩请求。该算法使用最佳发动机扭矩和最大电动机扭矩曲线来计算总动力系扭矩。
将驾驶员刹车踏板信号转换为刹车压力请求。该算法将制动踏板信号乘以最大制动压力。
为牵引电机实现再生制动算法,从车辆中回收最大的动能。
实现虚拟电池管理系统。该算法输出电池荷电状态函数的动态放电和充电功率限制。
HCM通过statflow中实现的一组规则和决策逻辑来确定车辆的操作模式。操作模式是电机速度和所需扭矩的函数。该算法利用计算出的功率请求、油门踏板、电池SOC和车辆速度规则,在电动汽车(EV)和混合动力汽车(HEV)并行模式之间进行转换。
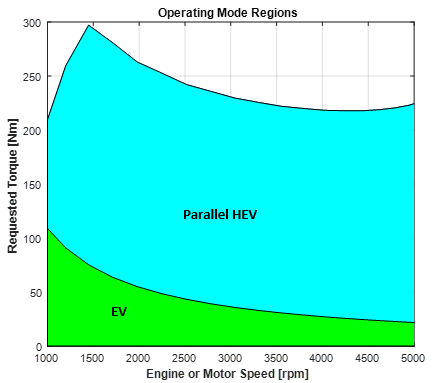
| 模式 | 描述 |
|---|---|
EV. |
牵引电机提供扭矩请求。 |
平行HEV. |
发动机和电机分配电源请求。基于目标电池SOC和可用的动能,HEV模式决定了电荷维持功率水平。并行HEV模式为发动机功率命令增加了电荷维持电源。为了提供所需的电荷维持力,如果需要充电,并且如果需要放电,则牵引电动机充当发电机。如果电源请求大于发动机功率,则牵引电机提供了电源请求的其余部分。 |
固定的 |
当车辆处于静止状态时,如果电池SOC低于最低SOC值,发动机和发电机可以提供可选充电。 |
HCM通过在型流中实现的一组规则和决策逻辑控制电机和引擎。
| 控制 | 描述 |
|---|---|
引擎 |
|
发动机 |
基于规则的功率管理算法计算不超过动态功率限制的电机扭矩。 |
乘用车
实施乘用车,乘用车子系统包含动力传动系统,电厂和发动机子系统。要为参考应用程序创建自己的引擎变体,请使用CI和SI引擎项目模板。参考应用程序具有这些变体。
传动系统
| 动力传动系统子系统 | 变体 | 描述 | |
|---|---|---|---|
微分和遵从性 |
全轮驱动 |
配置传动系统为全轮,前轮,或后轮驱动。对于全轮驱动变型,您可以配置耦合扭矩的类型。 |
|
前轮驱动(默认) |
|||
后轮驱动 |
|||
变矩器自动变速器 |
理想固定齿轮传动 |
使用1D或4D(默认)查找表配置锁定和解锁传输效率。 |
|
变矩器 |
配置为外部,内部(默认),或没有锁定。 |
||
车辆 |
车身纵向1自由度 |
配置为1个自由度 |
|
轮子和刹车 |
|
对于车轮,您可以配置的类型:
为确保性能和清晰度,为确定每个车轮的纵向力,各车型采用纵轮块。来确定总计所有车轮作用在轴上的纵向力,变型使用一个比例因子,将一个车轮的力乘以车轮在轴上的数量。通过使用这种方法来计算总力,变型假设相同的轮胎滑移和载荷在前后轴,这是常见的纵向动力系统研究。如果不是这样,例如当摩擦或负载在左右轴不同,使用独特的纵向轮块来计算独立力。然而,使用独特的块来建模每个轮子增加了模型的复杂性和计算成本。 |
|
|
|||
Simscape动力传动系统。自定义传动系的另一种方法是选择Simscape™ 变体。此变体包含物理连接,以提供灵活的方式组装组件。
使用参考应用程序顶层中的按钮在传动系子系统的Simscape和动力传动系块集变体之间切换。
参考应用程序设置适当的求解器以优化每个发动机和动力传动系统组合的性能。首先选择发动机变体,然后使用Toggle按钮选择动机。如果在更改引擎之前选择动机,则可能会遇到求解器错误。
发电厂
| 发电厂子系统 | 变体 | 描述 |
|---|---|---|
电池 |
Batthevp2. |
配置锂离子电池和DC-DC变换器 |
低压启动系统 |
StarterSystemP2 |
配置具有低压启动系统 |
发动机 |
MotMapped(默认) |
映射的电动机带有隐含控制器 |
MotDynamic |
带控制器的内部永磁同步电动机(PMSM) |
引擎
限制
迈斯沃克®用过硅芯发动机和SI控制器校准混合动力控制模块(HCM)。如果你使用CI核心引擎和CI控制器变,模拟可能会错误,因为HCM不使用校准的结果。
致谢
MathWorks感谢Simona Onori博士对本参考应用程序中实施的ECMS最优控制算法的贡献。Onori博士是斯坦福大学能源工程教授。她的研究兴趣包括电化学建模、用于汽车和电网级应用的储能装置的估算和优化、混合动力和电动汽车建模和控制、PDE建模以及排放缓解系统的模型降阶和估算。她是IEEE的资深成员®.
参考文献
[1] Balazs,A.,Morra,E.和Pischinger,S.,城市汽车电气化动力系统优化.SAE技术论文2011-01-2451。华伦戴尔:SAE国际替代动力系统杂志,2012。
[2] Onori,S.,Serrao,L.,和Rizzoni,G。,混合动力电动车能源管理系统.纽约:施普林格,2016。
另见
CI控制器|CI核心引擎|驱动循环来源|纵向驱动程序|映射CI引擎|映射的电动机|映射SI发动机|SI控制器|硅芯发动机
相关实例
更多关于
你也可以从以下列表中选择一个网站: