控制系统工具箱
关于控制系统的问题

控制系统工具箱™ 算法和应用程序是分析、概念和控制系统的基础。这一系统完成了转让、报告、合作和融资的持续性。在应用程序和功能方面,您可以在时间和频率范围内对系统的组件进行分析和可视化。
你们可以看到régler les paramètres des correcteurs à可以看到不同的技术互动,来看看环形和放置pôles。La toolbox règle automatiquement les correcteurs SISO et MIMO, notamment les contrôleurs PID。命令结构包括:réglables répartis sur plusieurs boucles de rétroaction。在这个工具箱中,您可以通过régler les contrôleurs à获得séquencés en spécifiant从réglage得到的对象可以通过le suivi de consigne, le rejet des扰动和les marges de stabilité。你们可以有效地看到réglage和spécifications en vérifiant montée的温度,le dépassement,稳定的温度,因为增益和相位的边际。
在知道加上:

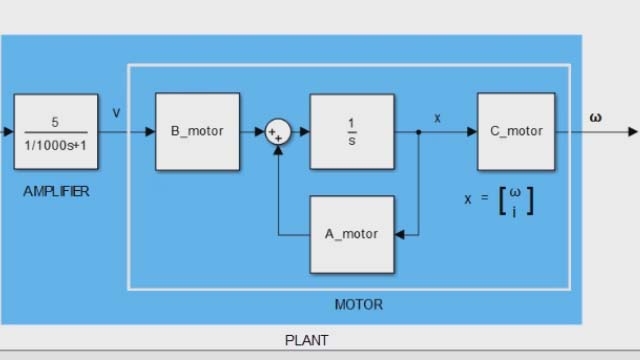
Modèles de functions de transfer和représentation d'état
Créez des modèles linéaires de systèmes不变量用于转移函数或représentations d'état。Manipulez les contrôleurs PID和les données de réponses fréquentielles。Modélisez des systèmes SISO ou MIMO,连续或离散。construct isez des schémas blocks complex en connectant les modèles de base en série, en parallèle ou en rétroaction。
Discretisation de模型
Utilisez les functions en ligne de command ou les tâches interactives Live Editor pour rééchantillonner des modèles de systèmes dynamiques et convertir les modèles entre les domaines continuu et discrete。Utilisez le bloqueur d'ordre zéro, la transformation bilinéaire de Tustin, la correspondence zéro-pôle and d'autres méthodes de discrétisation。

| Voir la galerie画廊(2张图片) |
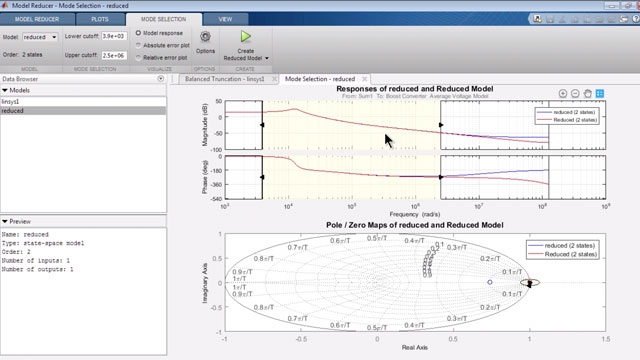
减少de模型
Utilisez l'application Model Reducer, les tâches Live Editor ou les functions en ligne de command pour réduire de manière interactive l' order d'un modèle de procédé ou de contrôleur tout en préservant les dynamiques importantes pour votre application。Utilisez la troncature équilibrée, la simplify pôle-zéro或sélection de模式的技术。
分析域名temporel和fréquentiel
Utilisez l'application Linear System Analyzer pour visualiser and compare les réponses en temps et en fréquence de plusieurs modèles en utilisant les tracés de réponse indicielle, de réponse impulse nelle, les diagram de Bode, de Nichols et de Nyquist, de valeur singulière et pôles-zéros。检查caractéristiques告诉我们关于montée的温度,稳定的温度和dépassement的最大值。
分析德stabilite
计算增益的边际,相位的边际以及fréquences的边际。检查图形化和numériquement l'emplacement des pôles和des zéros des systèmes dynamiques。计算平摊,fréquence propre和pôles d'un modèle linéaire的温度常数。

计算增益的边际,相位的边际以及fréquences的边际。
Passivité和部门的限制
计算系统线性不变量的被动测量差异。在系统被动性分析中,有限公司是各部门的仲裁人。

Voir la galerie画廊(2张图片)
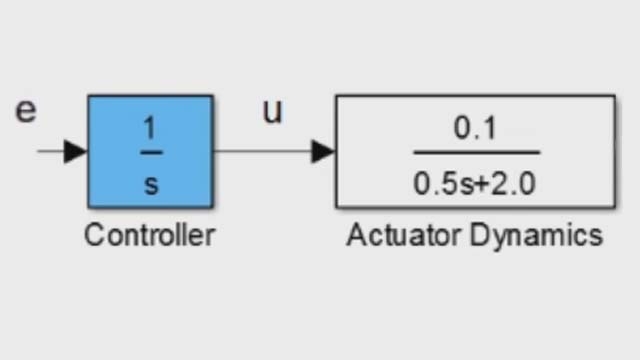
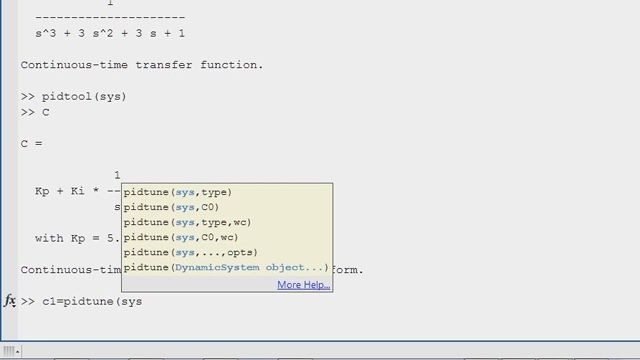
Réglage d'un contrôleur PID
您可以使用应用程序PID调谐器,可以使用tâches Live Editor,可以使用命令函数régler automatiquement可以使用contrôleurs PID,可以使用pondérer的性能和健壮性。Spécifiez les paramètres de réglage souhaités,告诉我们réponse的温度和相位的变化。Réglez les contrôleurs PID dans le domaine continuous or discrete。
过程动态估计
Créez un modèle de process à partir de données d'entrée-sortie mesurées directdans l'application PID Tuner à l'aide de System Identification Toolbox™。Vous pouvez également utiliser Live Editor pour identifier la dynamique de process and régler un contrôleur PID。

Controleur二自由度PID
Réglez des contrôleurs PID à deux degrés de liberté (2-DOF)。Utilisez un contrôleur 2-DOF PID au lieu d'un contrôleur 1-DOF PID pour bénéficier d'un meilleur rejet de扰动sans induire un dépassement significatif sur réponse indicielle。

Réglage d'un contrôleur 2-DOF PID (ligne pleine) et comparison un contrôleur 1-DOF PID (ligne en pointillés) dans l'application PID Tuner.
Design interactif à l'aide de pôles和de Bode diagram
Utilisez l'应用控制系统设计师的concevoir和分析器manière交互式les systèmes de contrôle SISO。根据成分的用法,告诉PID,相位的提前/延迟的校正器和滤波器à放置的辅助pôles,所以是波德和尼科尔斯的图。

Surveillance de la réponse en boucle fermée
将浮雕和浮雕的浮雕可视化,并将浮雕和浮雕的图形绘制在浮雕的动态图上。在时间和时间范围内的目标、时间和相位、最大通过时间、增益和相位。

设计multi-boucles
Réglez les contrôleurs composés de plusieurs boucles SISO。Fermez les boucle SISO de manière séquentielle, visualisez les interactions en boucle et réglez de manière itérative chaque boucle pour optimiser les performance globales。

Voir la galerie画廊(3张图片)
Reglage使自动化
Réglez automatiquement les systèmes de command mono-boucle and multiboucle in répondre aux exigences of conception haut niveau. Réglez automatiquement les systèmes de command mono-boucle and multiboucle in répondre aux exigences of conception haut niveau. Réglez automatiquement les systèmes
布克尔斯·西索和MIMO
您现在的位置是:本站信息仅供参考,仅供参考,欢迎访问控制系统调谐器。应用控制系统调谐器可用于命令功能modéliser et régler vos架构systèmes de contrôle SISO或MIMO可用于éléments réglables简单的增益,可用于contrôleurs PID或可用于滤波器。Réglez conjoinement plusieurs boucles dans système de contrôle multi-boucles。

时间和时间域的目标
浮冰的紧急情况、寄售货物的性能、扰动的恢复、布鲁伊特的放大、浮冰的侵位和稳定边缘。Réglez自动确定紧急情况义务(概念合同)和紧急情况下的控制参数(目标)。

Réglage d'un ensemble de modèles de process
我们可以通过contrôleur动态过程的有力变化,通过paramétriques或多个函数点,以及défaillances捕获者或行动者的有效吸收者。

工艺参数变化的机械控制设计。
Contrôleurs à获得séquencés dans Simul万博1manbetxink
Modélisez des systèmes de contrôle à增益séquencés dans Simul万博1manbetxink®à的代码块告诉les contrôleurs PID非平稳函数,非平稳函数,过滤拒绝器或通过非平稳函数。

Bibliothèque pour la modélisation de contrôleurs à gain séquencés dans S万博1manbetximulink。
Réglage求增益面
Réglez自动测量表面系数,以满足系统功能领域的性能需求,并向功能点过渡资源。对紧急情况的说明应考虑到各点的影响。在整个系统中,玻璃和贴花的效果都很好。

LQR/LQG和pôles的位置
Concevez的régulateurs linéaires二次(LQR) à temps连续和离散和contrôleurs linéaires二次高斯(LQG)。计算增益矩阵rétroaction pour placer vos pôles en boucle fermée aux emplacement souhaités。

Filtres德卡尔曼
Concevez和simulez de Kalman滤波,généralistes ou à增益convergé。Générez du code C/ c++ pour ces filters à l'aide de MATLAB Coder™et 万博1manbetxSimulink Coder™。

估价师état非linéaires
Estimez les états de systèmes non linéaires à l'aide de filtres de Kalman étendus,«unscented»ou de filtres à particules dans MATLAB®仿真软万博1manbetx件。您现在的位置是:虫虫下载站>资源下载> MATLAB / c++ pour ces filters à l'aide de MATLA万博1manbetxB Coder et Simulink Coder

分析线性
Utilisez l'outil d' analyze linéaire dans万博1manbetx Simulink Control Design™pour linéariser des modèles Simulink。计算réponses temporelles和fréquentielles des modèles linéarisés en utilisant les tracés de réponse indicielle ou impsionnelle,如果波德的图,尼科尔斯和奈奎斯特,值singulière和pôles-zéros。

Réglage de correcteur SISO
Réglez graphic quement les boucles de rétroaction SISO modélisées dan万博1manbetxs Simulink à l'aide de Simulink Control Design。Concevez des contrôleurs à l'aide d'éditeurs graphiques de Bode, de Nichols et et et pôles pour ajouter, modifier ou suprier des pôles, des zéros et gains de contrôleurs。

概念和规则
Réglez automatiquement les gain dans des contrôleurs PID modélisés dans S万博1manbetximulink。Utilisez的应用控制系统调谐器,我们的命令在Simulink控制设计régler自动化的收益和动态éléments de contrôle répartis su万博1manbetxr的boucles de rétroaction在Simulink。

现场编辑
exécutez de façon interactive des tâches de transformation de modèles et de design de contrôles, et générez du code MATLAB dans un live script。
Consultez莱斯指出de版本我们可以通过fonctionnalités和相应的函数来了解。