导航的工具箱
Concevoir, simuler和déployer是自主导航算法
导航工具箱™为运动的平化、本地化和制图simultanées (SLAM)提供算法和分析。工具箱里有算法échantillonnés个性化的轨迹的研究和平面化,也有métriques轨迹的验证和比较。您可以下载créer des représentations cartographhiques 2D和3D, générer des cartes avec算法SLAM和可视化器,我们可以下载débugger de manière interactive la génération de cartes avec l'application SLAM Map Builder。“工具箱”提出了modèles的捕获器和算法,为本地化。你可以用données IMU, GPS,旋转编码器和融合滤波器来模拟和可视化,并根据姿态进行多幅估计。
例如référence sont proposés为自主的应用程序,机器人和électronique大公众。您可以通过硬件(avec MATLAB Coder™或Simulink Coder™)在déployant方向上测试导航算法。万博1manbetx


表示cartographique
Créez网格d'占领2D和3D。用des必须外出multicouchesPour stocker des données génériques comme les coûts。Représentez关于障碍à关于碰撞的物体basés关于胶囊。

本土化与制图simultanées (SLAM)
Implémentez des解万博 尤文图斯决方案personnalisées de大满贯multicapteurs用稳健的图形进行优化。我们将相互作用应用于contrôler,并对boucles的fermetures进行修改。
规划化de trajectoires
所有的轨迹都在这里environnement)不同avec des planificateurs échantillonnés个性化的tel que RRT et RRT*,或可encore avec des planificateurs basés sur la recherche tel que A* et Hybrid A*。

资源的:
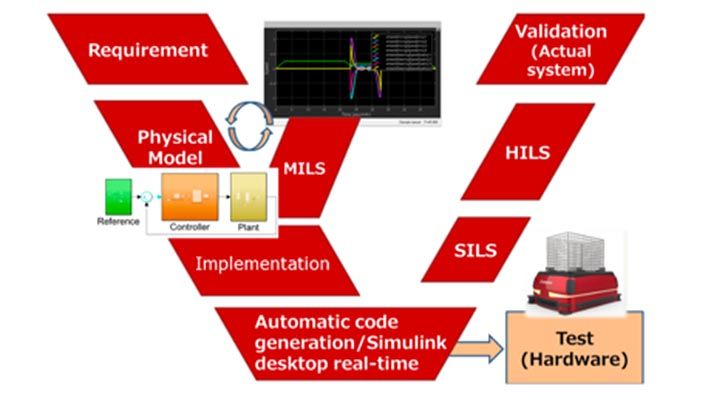
Avec MATLAB和Simul万博1manbetxink,我们可以conçu一个原型为contrôleur一个运动,我们可以testé一个硬件在我的空间。本地化的算法été évalué和les difficultés ont été surmontées在模拟中生效。»
武藏半光实业有限公司


