基于直接搜索的六元八木天线优化
本示例优化了6单元八木天线的方向性和方向性 使用全局优化技术进行输入匹配。天线的辐射方向图和输入阻抗对定义其形状的参数非常敏感。必须在其上执行此类优化的多维曲面具有多个局部优化。这使得找到满足优化目标的正确参数集的任务特别具有挑战性,并且需要使用全局优化技术。其中一种技术是模式搜索,这是一种基于直接搜索的优化技术,在天线设计优化方面取得了令人印象深刻的结果。
八木天线是一种广泛应用于商业和军事领域的辐射结构。这种天线已广泛用于接收VHF-UHF频率范围内的电视信号[1]。八木天线是一种定向行波天线,具有单个驱动元件,通常是一个折叠偶极子或一个标准偶极子,由几个被动偶极子包围。被动元素构成了反射器和导演。这些名称标识了相对于被驱动元件的位置。反射面偶极子位于天线辐射后瓣方向的被驱动元件后面,而定向器位于被驱动元件前面,位于形成主波束的方向。
设计参数
选择VHF频带中心的初始设计参数[2]。数据表列出了 在考虑平衡-不平衡变换器后的输入阻抗。我们的模型没有考虑平衡-不平衡变换器的存在,因此将匹配典型的折叠偶极子输入阻抗 .
fc=165e6;钢丝直径=12.7e-3;c=物理常数(“光速”)λ=c/fc;Z0=300;BW=0.05*fc;fmin=fc-2*(BW);fmax=fc+2*(BW);Nf=101;freq=linspace(fmin,fmax,Nf);
创建八木天线
八木Uda天线的从动元件是折叠偶极子。这是此类天线的标准励磁机。调整折叠偶极子的长度和宽度参数。由于我们将圆柱形结构建模为等效金属条,因此使用天线工具箱中的实用函数计算宽度™. 长度选择为 在设计频率。
d = dipoleFolded;d.Length =λ/ 2;d.Width = cylinder2strip (wirediameter / 2);d.Spacing = d.Length / 60;
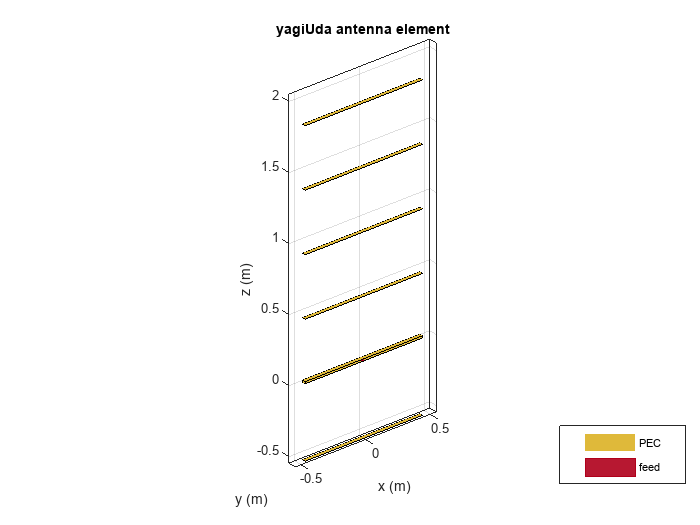
创建一个八木天线,将激励器作为折叠偶极子。选择要使用的反射器和导向器长度 .将控制器数量设置为4。选择要设置的反射器和控制器间距 , 分别。这些选择是初始猜测,将作为优化过程的起点。显示初始设计。
Numdirs = 4;refLength = 0.5;Numdirs dirLength = 0.5 * (1);refSpacing = 0.3;Numdirs dirSpacing = 0.25 * (1);exLength = d.Length /λ;exSpacing = d.Spacing /λ;initialdesign = [refength dirLength refSpacing dirSpacing exLength exSpacing].*lambda;yagidesign = yagiUda;yagidesign。Exciter = d; yagidesign.NumDirectors = Numdirs; yagidesign.ReflectorLength = refLength*lambda; yagidesign.DirectorLength = dirLength.*lambda; yagidesign.ReflectorSpacing = refSpacing*lambda; yagidesign.DirectorSpacing = dirSpacing*lambda; show(yagidesign)
绘制设计频率下的辐射图
在执行优化过程之前,在3D中绘制初始猜测的辐射模式。
图一=图;模式(yagidesign、fc);

这个最初的八木- uda天线在首选方向没有更高的方向性,意味着在天顶(仰角= 90度),因此是一个设计糟糕的散热器。
设置优化
使用以下变量作为优化的控制变量:
反射器长度(1个变量)
导演长度(4个变量)
反射器间距(1个变量)
导演间距(4个变量)
励磁机长度(1个变量)
励磁机间距(1个变量)
用一个矢量参数表示控制阀,设置
反射器长度=
controlVals (1)导演长度=
控制阀(2:5)反射器间距=
控制阀(6)导演间距=
控制阀(7:10)励磁机的长度=
controlVals (11)励磁机间隔=
controlVals (12)
依据控制阀,设置一个目标函数,其目标是在90度方向上具有较大的方向性值,-90度方向上具有较小的值,并且在仰角波束宽度角度边界之间具有较大的最大功率值。除方向性目标外,还包括阻抗匹配条件作为约束。任何违反约束的情况将惩罚目标。
类型yagi_objective_function_direct.m
function objectivevalue=yagi_objective_function_direct(y,controlVals,fc,BW,ang,Z0,constraints)%yagi_objective_direct返回6个元素的目标yagi%目标值=%yagi_objective_function_direct(y,controlVals,FREQ,ang,Z0,constraints),为yagi天线y分配%的适当寄生尺寸,controlVals,%并使用频率频率、角度对、ANG、参考阻抗Z0和%约束计算目标函数值YAGI_目标函数_直接函数用于内部示例。%它的行为可能会在后续版本中发生变化,因此不应%依赖它进行编程版权所有2018 MathWorks,Inc.y.Reflector Length=controlVals(1);y、 DirectorLength=controlVals(2:y.NumDirectors+1);y、 反射器间距=控制值(y.NumDirectors+2);y、 directorspace=controlVals(y.NumDirectors+3:end-2);y、 励磁机。长度=控制阀(端-1);y、 励磁机间距=控制阀(端);%解包约束Gmin=constraints.Gmin;Gdev=约束。GDEVION;FBmin=constraints.FBmin;S11min=0.S11min;K=约束。惩罚;%计算天线端口和场参数输出=分析天线(y、fc、BW、ang、Z0);%表单目标函数output1=output.MaxDirectivity+output.mistchloss;%天顶%增益约束下的方向性/增益,例如g>10 c1=0;如果输出1Gdev c1_dev=-Gdev+abs(输出1 Gmin);端部百分比前后比率约束,例如F/B>15 c2=0;如果output.FB S11min c3=-S11min+output.S11;目标+约束条件objectivevalue=-output1+max(0,(c1+c1_dev+c2+c3))*K;终端功能输出=分析天线(ant,fc,BW,ang,Z0)%AnalyzeAnnent计算目标功能%output=分析天线(Y,FREQ,BW,ang,Z0)在频率fc下对%天线ant进行分析,并在ang指定的%角度和前后比下计算方向性。相对于参考阻抗Z0的反射%系数,以及在FC周围带宽BW上计算的阻抗%。fmin=fc-(BW/2);fmax=fc+(BW/2);Nf=5;freq=唯一([fc,linspace(fmin,fmax,Nf)]);fcIdx=freq==fc;s=sparameters(ant,freq,Z0);Z=阻抗(ant,fc);az=ang(1,:);el=ang(2,:);Dmax=模式(ant、fc、az(1)、el(1));Dback=模式(ant、fc、az(2)、el(2));%计算F/B F_的方法是_B=Dmax Dback;%计算S11和失配损失S11=rfparam(s,1,1);S11=最大值(20*log10(abs(S11));T=平均值(10*log10(1-(abs(s11))。^2));%形成输出结构输出。MaxDirectivity=Dmax;output.BackLobeLevel=Dback;output.FB=F_乘以B;output.S11=S11;output.mistchloss=T;输出Z=Z;结束
设置控制变量的边界。
refLengthBounds=[0.3;%反射器长度的下限0.9);%反射器间距的上限dirLengthBounds=[0.30.30.30.3;导向器长度的下界0.7 0.7 0.7 0.7];导向器长度的上限refSpacingBounds = (0.05;%反射器间距的下限0.35];%反射器间距的上限直接间距边界=[0.05 0.05 0.05 0.05;指示符间距的下界0.2 0.2 0.3 0.3];%指向矢间距的上界exciterLengthBounds = (0.45;激振器长度下界%0.6];%励磁机长度上限ExciterPacingBounds=[.004;.009];LB=[refLengthBounds(1),dirLengthBounds(1,:)refSpacingBounds(1)dirSpacingBounds(1,:)exciterLengthBounds(1)ExciterPacingBounds(1)]。*lambda;UB=[refLengthBounds(2),dirLengthBounds(2,:)refSpacingBounds(2)dirSpacingBounds(2,:)exciterLengthBounds(2)ExciterPacingBounds(2)]*lambda;parameterBounds.LB=LB;parameterBounds.UB=UB;ang=[0;90-90];主瓣和后瓣的方位角、仰角%
基于直接搜索的优化
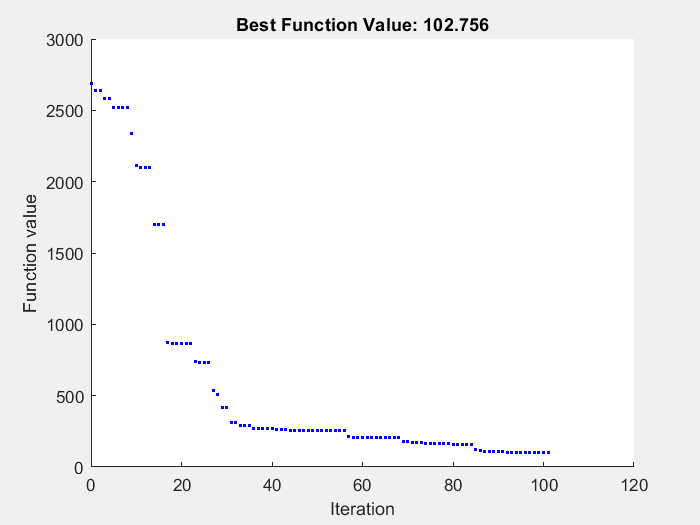
全局优化工具箱™ 提供一个基于直接搜索的优化函数,名为模式搜索.属性指定的选项使用此函数psoptimset函数。在每一次迭代中,绘制目标函数的最佳值,并限制总迭代次数为300次。通过使用一个匿名函数以及边界和选项结构,将目标函数传递给patternsearch函数。优化过程中所使用的目标函数模式搜索可在文件中找到八木函数.
函数中给出了与定义为最大辐射以及最大副瓣和后瓣电平的角度区域相对应的不同方向上的方向性评估calculate_objectives内提供八木鸟目标函数.
%优化器选择optimizerparams = optimoptions (@patternsearch);optimizerparams。UseCompletePoll = true;optimizerparams。PlotFcns = @psplotbestf;optimizerparams。UseParallel = true;optimizerparams。缓存=“上”;optimizerparams。麦克斯特= 100;optimizerparams。FunctionTolerance = 1飞行;天线设计参数designparams。天线= yagidesign;designparams。边界= parameterBounds;%分析参数analysisparams.CenterFrequency=fc;analysisparams.Bandwidth=BW;analysisparams.ReferenceImpedance=Z0;analysisparams.MainLobeDirection=ang(:,1);analysisparams.BackLobeDirection=ang(:,2);%设置限制约束。S11min = -10;约束。Gmin = 10.5;约束。Gdeviation = 0.1;约束。FBmin = 15;约束。点球= 50;optimdesign = optimizeAntennaDirect (designparams, analysisparams、约束optimizerparams);
正在使用连接到并行池的“本地”配置文件启动并行池(parpool)(工作进程数:6)。
优化终止:网格大小小于options.MeshTolerance。
绘图优化模式
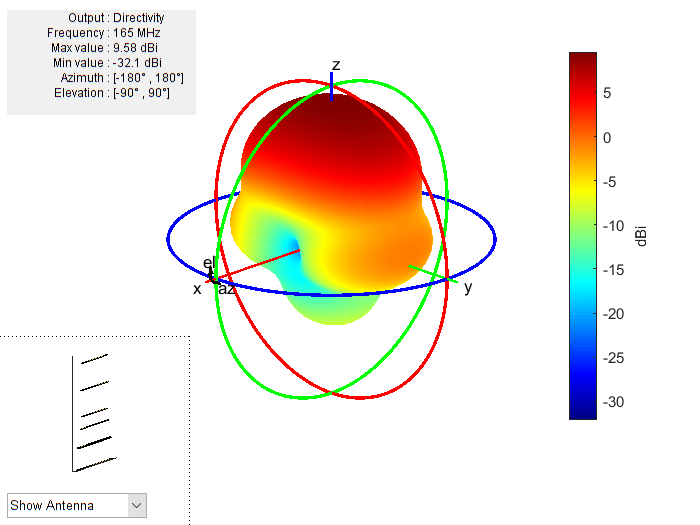
在设计频率处绘制优化的天线方向图。
yagidesign.Reflector长度=优化设计(1);yagidesign.DirectorLength=优化设计(2:5);yagidesign.反射器间距=优化设计(6);yagidesign.DirectorSpacing=优化设计(7:10);yagidesign.Exciter.Length=优化设计(11);yagidesign.Exciter.SPACE=优化设计(12);图2=数字;模式(yagidesign,fc)
图案的E和h平面切割
为了更好地了解两个正交平面中的行为,绘制E平面和H平面中电场的归一化大小,即方位角分别为0度和90度。启用极性方向图上的天线度量,以确定天顶方向性、前后比以及E面和H面中的波束宽度。

% fig3 =图;% patternElevation (yagidesign fc 0,“海拔”,0:1:359);% pE = polarpattern('gco');%pE.AntennaMetrics=1;

% fig4 =图;%模式高程(yagidesign,fc,90,“高程”,0:1:359);%pH=极性模式(“gco”);%pH.AntennaMetrics=1;
优化设计表明,辐射方向图有了显著改善。在朝向天顶的理想方向上实现了更高的方向性。后瓣较小,因此该天线具有良好的前后比。
优化天线的输入反射系数
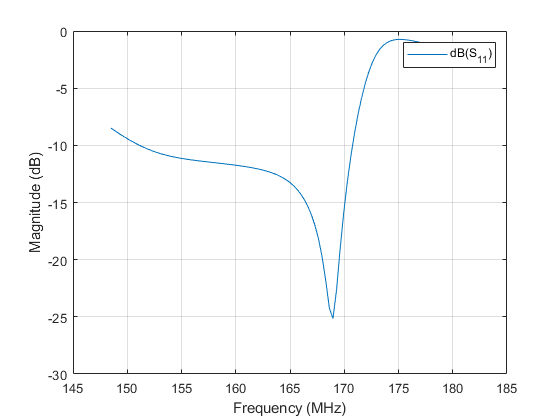
计算了优化后的八木天线的输入反射系数,并绘制了相对于参考阻抗的曲线 .将-10 dB或更低的值视为良好的阻抗匹配。
s=sparameters(yagidesign,freq,Z0);图5=图形;rfplot(s);
与制造商数据表的比较
优化的八木天线实现了大于10 dBi的前向方向性,这转化为大于8 dBd的值(相对于偶极子)。这接近数据表报告的增益值(8.5 dBd)。F/B比大于15 dB。优化后的八木田天线具有E面和H面波束宽度,与数据表中分别列出的54度和63度的值相比,这两种天线的波束宽度都很好。该设计实现了良好的阻抗匹配 ,并具有约8%的-10 dB带宽。
datasheetparam = {‘增益(dBi)’;“F/B”;“E-plane波束宽度(度);“H面波束宽度(度)”;的阻抗带宽(%)};数据表ALS=[10.5,16,54,63,10];优化设计VAL=[10.59,15.6,50,62,12.1];Tdatasheet=表格(数据表ALS,优化设计VAL,“RowNames”datasheetparam)
数据表=5×2表datheetvals optimdesignvals _____________ _______________增益(dBi) 10.5 10.59 F/B 16 15.6 E-plane波束宽度(deg.) 54 50 H-plane波束宽度(deg.) 63 62阻抗带宽(%)10 12.1 .
列出初始和优化设计
将初始设计猜测和最终优化设计值制成表格。
yagiparam = {“反射器长度”;“导演长度- 1”;“控制器长度-2”;“控制器长度-3”;“控制器长度-4”;“反射器间距”;“控制器间距-1”;“董事间距- 2”;“董事间距- 3”;“控制器间距-4”;“励磁机长度”;“励磁机间距”};initialdesign = initialdesign ';optimdesign = optimdesign ';Tgeometry =表(initialdesign optimdesign,“RowNames”yagiparam)
T几何=12×2表初始设计优化设计-反射镜长度0.90846 0.90846方向盘长度-1 0.90846 0.78346方向盘长度-2 0.90846 0.65846方向盘长度-3 0.90846 0.78346方向盘长度-4 0.90846 0.78346方向盘长度-4 0.90846 0.78346方向盘长度-4 0.90846 0.78346方向盘间距0.54508 0.4786方向盘间距-1 0.45423 0.23838方向盘间距-2.191C方向盘间距ing-3 0.45423 0.3876导向器间距-4 0.45423 0.39173励磁机长度0.90846 0.84596励磁机间距0.015141 0.016118
参考文献
[1] 巴拉尼斯,天线理论。分析与设计,p。514,威利,纽约,第三版,2005年
[2] 网上:s.6y - 165
另请参阅
您还可以从以下列表中选择网站: