IMU和GPS融合惯性导航
此示例显示了如何构建适用于无人机(无人机)或Quadcopters的IMU + GPS融合算法。
本例使用加速度计、陀螺仪、磁力计和GPS来确定无人机的方向和位置。
仿真设置
设置采样率。在典型的系统中,加速度计和陀螺以相对较高的样品速率运行。从融合算法中的那些传感器处理数据的复杂性相对较低。相反,GPS,以及在某些情况下,磁力计以相对较低的采样率运行,以及与处理它们相关的复杂性很高。在该融合算法中,磁力计和GPS样品以相同的低速率加工在一起,加速度计和陀螺仪样品以相同的高速加工在一起。
为了模拟这种配置,IMU(加速度计,陀螺仪和磁力计)在160Hz上采样,并且GPS在1 Hz时采样。仅给予融合算法中每160个样品中的每个160个样品中的一个,因此在真实系统中,磁力计可以以更低的速率进行采样。
imuFs = 160;gpsFs = 1;%定义地球上的哪个模拟场景使用%纬度,经度和高度。Refloc = [42.2825 -72.3430 53.0352];%验证| GPSFS |分开| imufs |。这允许传感器样本使用嵌套循环模拟的%速率而无需复杂的采样率%匹配。imuSamplesPerGPS = (imuFs / gpsFs);断言(imuSamplesPerGPS = =修复(imuSamplesPerGPS),......'GPS采样率必须是IMU采样率的整数因素。);
融合过滤器
创建滤波器融合IMU + GPS测量值。融合滤波器使用扩展卡尔曼滤波器来跟踪定向(四元数)、速度、位置、传感器偏差和地磁矢量。
这个insfiltermarg.有几种处理传感器数据的方法,包括预测那fusemag.和Fusegps.。这预测方法将加速度计和陀螺仪采样从IMU作为输入。打电话给预测每次采样加速度计和陀螺仪时,方法都有方法。该方法基于加速度计和陀螺仪预测状态前进的一个时间步导。扩展卡尔曼滤波器的错误协方差在此处更新。
这Fusegps.方法以GPS样本为输入。该方法通过计算卡尔曼增益来更新基于GPS样本的滤波状态,卡尔曼增益根据传感器输入的不确定性对其进行加权。这里也更新了误差协方差,这次也使用了卡尔曼增益。
这fusemag.方法是类似的,但是基于磁力计样本更新状态,卡尔曼增益和错误协方差。
虽然是insfiltermarg.将加速度计和陀螺仪样品作为输入进行,它们分别集成以分别计算Δ速度和Δ角度。过滤器跟踪磁力计的偏置和这些集成信号。
fusionfilt = insfilterMARG;fusionfilt。IMUSampleRate = imuFs;fusionfilt。ReferenceLocation = refloc;
无人机轨迹
此示例使用从UAV记录的保存轨迹作为地面真相。此轨迹被送入多个传感器模拟器以计算模拟加速度计,陀螺仪,磁力计和GPS数据流。
%加载“地面真理”UAV轨迹。负载loggedquadcopter.mat.trajdata.;trajorient = trajdata.orientation;trajvel = trajdata.velocity;trajpos = trajdata.position;trajacc = trajdata.acceleration;trajangvel = trajdata.angularvelocity;%初始化传感器仿真中使用的随机数发生器%的噪音。RNG(1)
GPS传感器
在指定的采样率和参考位置设置GPS。另一个参数控制输出信号中噪声的性质。
GPS = GPSSensor('updaterate',GPSFS);gps.referenceLocation = RESTOC;gps.decayfactor = 0.5;%随机步行噪声参数gps.horizoNtalpositionAccuracy = 1.6;GPS.verticalPositionAccuracy = 1.6;gps.velocityAccuracy = 0.1;
IMU传感器
典型地,无人机使用集成的MARG传感器(磁、角速率、重力)进行姿态估计。要建模MARG传感器,定义一个包含加速度计、陀螺仪和磁力计的IMU传感器模型。在实际应用中,这三个传感器可以来自一个集成电路,也可以来自单独的集成电路。此处设置的属性值是低成本MEMS传感器的典型值。
imu = imusensor(“accel-gyro-mag”那“SampleRate”,imufs);IMU.MagneticField = [19.5281-5.0741 48.0067];%加速度计Imu.accelerometerm.measurementRange = 19.6133;Imu.accelerometer。效果= 0.0023928;imu.accelerometer.constantbias = 0.19;IMU.Accelerometer。不生系= 0.0012356;%陀螺仪imu.gyroscope.measurementrange = deg2rad(250);imu.gyroscope.resolution = deg2rad(0.0625);imu.gyroscope.constantbias = deg2rad(3.125);imu.gyroscope.axesmisalignment = 1.5;imu.gyroscope.noisedensity = deg2rad(0.025);%磁力计imu.magnetometer.measurementRange = 1000;IMU.Magnetometer.resolution = 0.1;imumagnetometer.constantbias = 100;IMU.Magnetometer.NoizeSensy = 0.3 / SQRT(50);
初始化的状态向量insfiltermarg.
这insfiltermarg.跟踪一个包含22个元素的向量中的姿势状态。美国是:
状态单位状态矢量索引取向为四元数1:4位置(NED)M 5:7速度(NED)M / S 8:10 Delta角度偏置(XYZ)Rad 11:13 Delta Velocity偏置(XYZ)M / S 14:16地形磁场矢量(NED)UT 17:19磁力计偏差(XYZ)UT 20:22
地面真理用于帮助初始化过滤器状态,因此过滤器会很快收敛到良好的答案。
%初始化过滤器的状态initstate = zeros(22,1);initstate(1:4)= compact(VileRot(Trajorient(1:100)));初始持久性(5:7)=均值(trajpos(1:100,:),1);初学者(8:10)=均值(trajvel(1:100,:),1);initstate(11:13)= imu.gyroscope.constantbias./imufs;initstate(14:16)= imu.accelerometer.constantbias./imufs;初学者(17:19)= IMUMagnetfield;initstate(20:22)= imu.magnetometer.constantbias;fusionfilt.state = initstate;
初始化变量的方差insfiltermarg.
这insfiltermarg.测量噪音描述了噪音损坏了传感器读数。这些值基于imusvesor.和GPSSensor.参数。
过程噪声描述了滤波器方程如何很好地描述状态演化。利用参数扫描联合优化滤波器的位置和方向估计,经验地确定过程噪声。
%测量噪声RMAG = 0.09;%磁强计测量噪声rvel = 0.01;%GPS速度测量噪声rpo = 2.56;%GPS位置测量噪声%流程噪音Fusionfilt.accelerometerBiasnoise = 2E-4;fusionfilt.acceleromernoise = 2;Fusionfilt.gyroscopbiasnoise = 1e-16;Fusionfilt.gyroscopenoise = 1E-5;Fusionfilt.MagnetomerBiasnoise = 1E-10;fusionfilt.geomagneticVectornoise = 1e-12;%初始错误协方差fusionfilt.statecovariance = 1e-9 *那些(22);
初始化范围
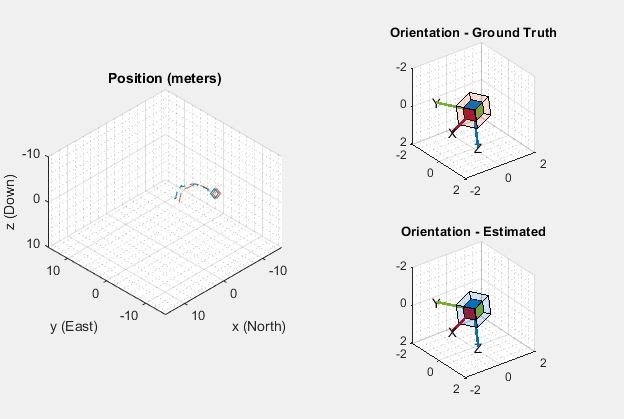
这HelperScrollingPlotter范围使得能够随着时间的推移绘制变量。这里用于跟踪姿势的错误。这HelperPoseViewer范围允许过滤器估计和地面真实姿态的三维可视化。示波器会减慢模拟的速度。若要禁用范围,请将相应的逻辑变量设置为假。
umererrscope = true;%打开流媒体错误绘图usePoseView = true;%打开3-D姿势查看器如果useerrscope errscope = evermercrollingplotter(......'numinputs'4......“时间间隔”10,......“SampleRate”imuFs,......'ylabel',{'度'那......“米”那......“米”那......“米”},......'标题',{“四元数距离”那......'位置x错误'那......'位置y错误'那......'位置z错误'},......“YLimits”那......[-1,1 -2,2 -2 2 -2 2]);结束如果使用posescope = HelperPoseViewer(......'xpositionlimits',[-15 15],......'ypositionLimits'(-15年,15),......'zpositionlimits',[-10 10]);结束
模拟循环
主模拟循环是一小时的循环,带有嵌套循环。循环执行虽然循环执行gpsFs,这是GPS采样率。嵌套循环执行IMUFS.,这是IMU采样率。该范围以IMU采样率更新。
%循环设置 - | trajdata |有大约142秒的记录数据。secondsToSimulate = 50;%模拟约50秒numsamples = secondsToSimulate * imuFs;loopBound =地板(numsamples);loopBound =地板(loopBound / imuFs) * imuFs;%确保有足够的IMU样品%记录最终度量计算的数据。pqorient = quaternion.zeros(LoopBound,1);pqpos = zeros(loopbound,3);fcnt = 1;尽管(fcnt < = loopBound)%|预测|在IMU更新频率下循环。为ff = 1:imusamplespergps%模拟来自当前姿势的IMU数据。[accel, gyro, mag] = imu(trajAcc(fcnt,:), trajAngVel(fcnt,:),),......trajorient(fcnt));%使用|预测|估计基于滤波器状态的方法模拟加速度计和陀螺仪信号上的%。预测(Fusionfilt,Accel,Gyro);%获取过滤器状态的当前估计。[Fusedpos,Fusulorient] =姿势(Fusionfilt);%保存后处理的位置和方向。pqorient(fcnt)= fusedorient;pqpos(fcnt,:) =融合;%计算错误和绘图。如果umererrscope orienterr = rad2deg(dist(fusedorient,......trajorient(fcnt)));poserr = fusedpos - trajpos(fcnt,:);errscope(东方,poserr(1),poserr(2),poserr(3));结束%更新姿势查看器。如果使用posescope(pqpos(fcnt,:), pqorient(fcnt), trajPos(fcnt,:),......trajorient(fcnt,:));结束fcnt = fcnt + 1;结束%这次下一步发生在GPS采样率。%根据当前姿态模拟GPS输出。[lla, gpsvel] = gps(trajPos(fcnt,:), trajVel(fcnt,:));%根据GPS数据和磁场修正滤波器状态%实地测量。Fusegps(Fusionfilt,LLA,RPO,GPSVel,rvel);Fusemag(Fusionfilt,Mag,Rmag);结束
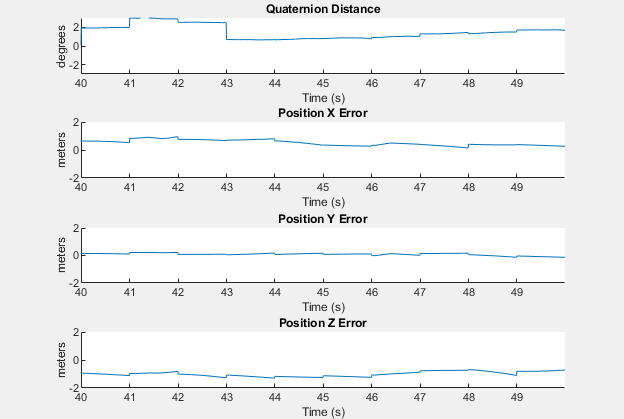
错误度量计算
在整个仿真中记录位置和方向估计。现在计算一个位置和方向的端到端根均匀误差。
posd = pqpos(1:loopBound,:) - trajPos(1:loopBound,:);取向的%,四元距离是一个更好的替代方案%减去欧拉角,欧拉角有不连续。四元数的%距离可以用|dist|函数计算,该函数给出以弧度表示的方向的角差。转换为度%显示在命令窗口中。quatd = rad2deg(dist(pqorient(1:loopbound),trajorient(1:loopbound))));%在命令窗口中显示RMS错误。fprintf('\ n \ n \ n末端模拟位置rms错误\ n');
端到端模拟位置RMS错误
MSEP = SQRT(平均值(POSD。^ 2));fprintf('\ tx:%.2f,y:%.2f,z:%.2f(米)\ n \ n'msep (1)......msep msep (2), (3));
X:0.57,Y:0.53,Z:0.68(米)
fprintf('端到端四元数距离RMS误差(度)\n');
端到端四元数距离RMS误差(度)
fprintf(' \ t %。2 f(度)\ n \ n ',sqrt(平均值(quatd ^ 2))));
0.32(度)
您还可以从以下列表中选择一个网站: