轨道到轨道融合简介
轨道轨道融合与中央级跟踪
A multiple sensor tracking system can provide better performance than a single sensor system because it can provide broader coverage and better visibility. Moreover, fusing detections from different types of sensors can also improve the quality and accuracy of the target estimates. Two types of architecture are commonly used in a multiple sensor tracking system. In the first type of architecture — central-level tracking — the detections from all the sensors are sent directly to a tracking system that maintains tracks based on all the detections. Theoretically, the central-level tracking architecture can achieve the best performance because it can fully use all the information contained in the detections. However, you can also apply a hierarchical structure with sensor-level tracking combined with track-level fusion for a multiple sensor system. The figure shows a typical central-level tracking system and a typical track-to-track fusion system based on sensor-level tracking and track-level fusion.
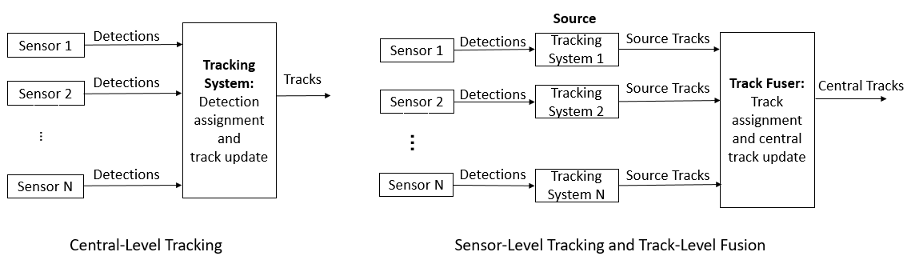
要在轨道到轨道融合系统中表示每个元素,请致电跟踪系统,该系统将输出跟踪到定影器作为源,并从源轨道或本地轨道中调用输出的轨道。将保险箱中的轨道称为中央轨道。
Benefits and Challenges of Track-To-Track Fusion
在某些情况下,轨道轨道融合体系结构可能比中央级跟踪体系结构更可取。这些案例包括:
在许多应用程序中,跟踪系统不仅需要跟踪其自动化环境中的目标,而且还需要将其维护的跟踪转移到周围的跟踪系统中,以提高整体导航性能。例如,跟踪其自身情况环境的自动驾驶汽车也可以与其他车辆共享维护的轨道,以促进其导航。
In practice, many sensors directly output tracks instead of detections. Therefore, to combine information from sensors that output tracks, the track-level fusion is required.
当通信带宽受到限制时,传输轨道列表通常比传输一组检测更有效。对于相对于扫描速率,以降低的速率提供轨道列表的情况,这可能特别重要。
When the number of sensors and detections is large, the computation complexity for the centralized tracking system can be high, especially for detection assignment. The track-to-track fusion architecture can distribute some assignment and estimation workloads to the sensor-level tracking, which reduces the computation complexity of the fuser.
尽管有所有有利于轨道轨道融合体系结构的优势,但它还对跟踪系统构成了额外的复杂性和挑战。与可以假定有条件独立的检测不同,来自每个源的轨道估计是相互关联的,因为它们共享了由共同过程模型产生的共同预测错误。因此,使用标准滤波方法计算融合轨道可能会导致不正确的结果。必须考虑以下效果:
常见的过程噪声 - 由于传感器观察并跟踪相同的目标,因此它们共享一些共同的动态。结果,目标操作会导致所有传感器常见的平均误差。
Time-correlated measurement noise — If the track fusion is repeated over time, the standard Kalman filter assumption that measurements are not correlated over time is violated, because the sensor-level track state estimation errors are correlated over time.
Track Fuser and Tracking Architecture
您可以使用TrackFuser在传感器融合和跟踪Toolbox™中,出于轨道对轨道融合的目的。这TrackFuserSystem Object™提供了两种算法,以考虑不同轨道之间的校正效果的源轨道。您可以通过指定该算法来选择该算法状态灌注property ofTrackFuser作为:
'叉'- 使用跨互助融合算法。'Intersection'— Uses the covariance intersection fusion algorithm.
You can also customize your own fusion algorithm.
Other than the standard track-to-track fusion architecture shown in the preceding figure, you can also use other types of architectures withTrackFuser。例如,下图说明了两个车辆跟踪系统。
在每辆车上,两个传感器通过相关跟踪器跟踪附近的目标。每辆车也都有一个放电器,可融合两个跟踪器的源轨道。Fuser 6可以将其维护的中央轨道传输到Fuser 3。使用此架构,车辆1可以识别不在其自身传感器视野内的目标(图中的目标2)。
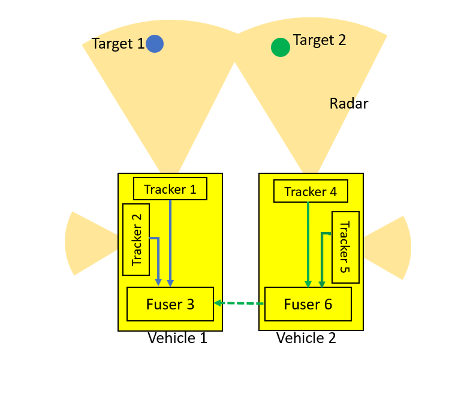
为了减少谣言的传播,您可以通过指定将源音轨从Fuser 6到Fuser 3的外部处理IsInternalSourceproperty ofFusersourceconfiguration作为false设置SourceConfigurationproperty ofTrackFuser。
由于可以在不同的坐标框架中表达不同跟踪器报告的轨道,因此您需要通过指定源和定影之间的坐标转换来指定坐标转换。Fusersourceconfiguration财产。
也可以看看
TrackFuser|Fusersourceconfiguration|Trackergnn|trackerjpda|Trackertomht|trackerphd
References
[1] Chong,C。Y.,S。Mori,W。H. Barker和K. C. Chang。“轨道关联和融合的体系结构和算法。”IEEE航空航天和电子系统杂志,卷。15,第1号,2000年,第5 - 13页。
您还可以从以下列表中选择一个网站:
美洲
- América Latina(Español)
- 加拿大(英语)
- 美国(英语)