trackerPHD
多传感器、多目标PHD跟踪器
描述
这个trackerPHD系统对象™能够从多个传感器处理的多个目标检测的一个跟踪器。跟踪器使用多目标概率假设密度(PHD)滤波器估计的点目标和扩展对象的状态。PHD是在跟踪系统的状态空间中定义的功能,其在状态值被定义为每单位状态空间体积的目标的预期数目。的PHD由的概率密度函数,且峰在PHD对应于可能的目标的加权求和(混合物)来表示。有关如何跟踪功能的概述,请参阅算法。
默认情况下,trackerPHD可以使用ggiwphd过滤器,从伸出物体模型检测作为解析点云。您还可以使用trackerPHD与gmphd过滤器,其轨迹点目标和与指定的形状的扩展物体。输入到跟踪器是通过产生的检测报告目标检测,雷达传感器,monostaticRadarSensor,irSensor, 要么声纳传感器对象。跟踪器输出所有维护的轨迹及其分析信息。
要使用这个对象跟踪目标:
创建
trackerPHD对象并设置其属性。使用参数调用对象,就好像它是一个函数一样。
要了解有关系统对象如何工作的更多信息,请参见什么是系统对象?(MATLAB)。
创建
描述
跟踪器= trackerPHDtrackerPHD与默认属性值系统对象。
跟踪器=跟踪程序高清(名称、值)trackerPHD('MaxNumTracks',100个)创建一个PHD跟踪器,其允许最大100个轨道。在引号中每个属性的名称。
属性
用法
为了处理检测和更新曲目,调用带参数的跟踪,就好像它是一个函数(详见这里)。
语法
描述
confirmedTracks=跟踪器(检测,时间)检测,在更新时,时间. 已确认的轨迹将被修正并预测到更新时间。
confirmedTracks=跟踪器(检测,配置,时间)配置。当传感器的配置随时间变化时,请使用此语法。若要启用此语法,请设置HasSensorConfigurationsInput属性到真正。
[还返回一个暂定曲目列表,confirmedTracks,tentativeTracks,allTracks] =跟踪器(___)tentativeTracks和所有的曲目列表,allTracks。您可以使用此输出语法与任何先前输入语法。
[还返回分析信息,confirmedTracks,tentativeTracks,allTracks,analysisInformation] =跟踪器(___)analysisInformation,其可用于迹分析。您可以使用此输出语法与任何先前输入语法。
输入参数
输出参数
对象函数
要使用对象函数,请将系统对象指定为第一个输入参数。例如,要释放名为目标,使用此语法:
释放(obj)
例子
使用trackerPHD跟踪两个对象
设置传感器构造,创建一个PHD跟踪器,以及与检测供给跟踪器。
%创建传感器配置。指定传感器的杂波密度和%的IsValidTime属性设置为true。配置= trackingSensorConfiguration(1);configuration.ClutterDensity = 1E-7;configuration.IsValidTime = TRUE;%创建一个博士跟踪器。跟踪= trackerPHD('传感器配置',组态);%创建近点检测[5; 1-5; 0]和[1-5; 5; 0]在t = 0,和%更新这些检测跟踪。检测=细胞(20,1);对于i=1:10检测{i}=objectDetection(0,[5;-5;0]+0.2*randn(3,1));结束对于j=11:20检测{j}=objectDetection(0,[-5;5;0]+0.2*randn(3,1));结束跟踪器(检测,0);
假设目标以每秒[1;2;0]单位的恒定速度移动,在0.1秒后再次更新跟踪器。
的dT = 0.1;对于i = 1:20检测{i}。时间=检测{}。时间+ dT;检测我{}。米easurement = detections{i}.Measurement + [1;2;0]*dT;结束[confTracks, tentTracks allTracks] =追踪(检测,dT);
可视化检测和确认的轨道。
%从检测中获得测量值。d =[检测{}):;测量= [d.Measurement];确认跟踪使用getTrackPositions的%浸出位置的功能。请注意,我们使用了默认的传感器配置%FilterInitializationFcn,initcvggiwphd,它使用的等速%模型并定义为状态[X; VX; Y; VY; Z; VY。positionSelector=[1 0 0 0 0 0 0 0;0 0 1 0 0 0;0 0 0 0 1 0];positions=getTrackPositions(confTracks,positionSelector);figure()绘图(测量(1,:)、测量(2,:),“x”,'MarkerSize'5,'MarkerEdgeColor',“b”);保持上;绘图(位置(1,1),位置(1,2),“v”,'MarkerSize'5,'MarkerEdgeColor',“r”);保持上;图(位置(2,1),位置(2,2),'^','MarkerSize'5,'MarkerEdgeColor',“r”);传说('检测','曲目1','曲目2')xlabel(“x”)ylabel(“是”)
![]()
更多关于
算法
概率假设密度
概率假设密度(PHD)是通过跟踪系统的状态空间中定义的功能,其在状态值被定义为每单位状态空间体积的目标的预期数目。所述PHD通常通过组件的每个组件对应于状态的估计值的混合物,和近似。PHD的常用近似值是高斯混合,SMC混合物,GGIW混合物,和GIW混合物。目前,trackerPHD实现由GGIW混合物表示ggiwphd,可用于跟踪扩展对象。
为了理解博士学位,以高斯混合为例。高斯混合可以用
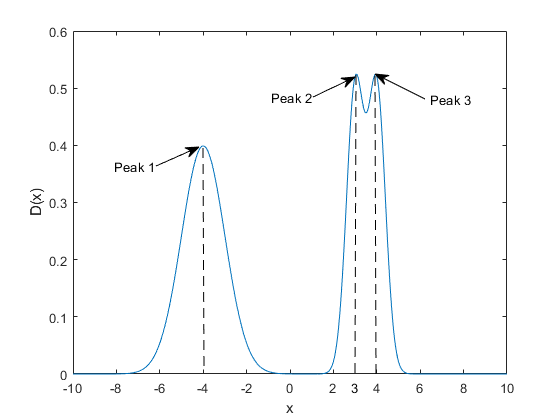
哪里米是部件的总数量,N个(十|米我,第页我)是正态分布,平均米我和协方差第页我和西我是的重量我组件。重量西我表示的目标数目(可以是小数)我第个部分。整合丁(十)超过在该地区的预期数量的目标的状态空间区域的结果。整合丁(十)在整个状态空间上产生目标的总期望数量(∑西我)中,由于在整个状态空间中的正态分布的积分为1。十峰的坐标(局部最大值)的丁(十)表示目标最有可能的状态。
例如,下图说明了由丁(十)=N个(十|-4,2)+0.5N个(十|3,0.4)+0.5N个(十| 4,0.4)。这些组分的重量总和为2,这意味着2个目标可能存在。从峰丁(十),这些目标的可能位置是十= -4十= 3,并且十= 4.注意,最后两种组分都非常接近彼此,这意味着,这两个部件可以有可能归因于一个对象。
参考
[1] 格兰斯托姆,K.,C.伦德最安静,O.奥古纳。”使用高斯混合PHD滤波器的扩展目标跟踪。”IEEE交易在航空航天和电子系统。第48卷,第4期,2012年,第3268-3286页。
[2] Granstorm,K.,和O. Orguner。 “用于使用随机矩阵跟踪多个扩展目标甲PHD滤波器”。IEEE TRANSACTIONS ON信号处理。第60卷,第11期,2012年,第5657-5671页。
[3] Granstorm, K.和A. Natale, P. Braca, G. Ludeno和F. Serafino。利用x波段海洋雷达数据进行扩展目标跟踪的伽马高斯反Wishart概率假设密度。地球科学与遥感IEEE汇刊。卷。53,编号12,2015年,第6617-6631。
扩展功能
另见
功能
物体
系统对象
在R2019a中引入
也可以从以下列表中选择网站: