线性卡尔曼滤波器
当使用卡尔曼滤波器来跟踪对象,则使用检测或测量的顺序来构造对象运动的模型。对象运动是由物体的状态的演变限定。卡尔曼滤波器是一个最佳的,递归算法用于估计目标的轨道。该过滤器是递归的,因为它使用了以前的状态,使用可能已在间隔取得测量更新当前的状态。卡尔曼滤波器采用了这些新的测量,以保持状态估计尽可能准确。该过滤器是最佳的,因为它最大限度地减少国家的均方误差。您可以使用过滤器来预测未来的状态或估计当前状态或过去的状态。
状态方程
对于传感器融合和跟踪工具箱™中跟踪的大多数类型的对象,状态向量由一个、两个或三维位置和速度组成。
从运动物体的牛顿方程开始X- 方向以恒定的加速度和这些方程转换为空间状态形式。
如果定义状态
你可以把牛顿定律写成状态空间的形式。
您使用的线性动态模型,当你有信心,对象遵循该类型的运动。有时模型包括过程噪声反映在运动模式的不确定性。在这种情况下,牛顿方程有一个附加项。
vķ为加速度的未知噪声摄动。只有噪音的统计数据是已知的。假设为零均值高斯白噪声。
您可以在此类型的方程扩展到多个维度。在两个维度中,方程式的形式为
右边的4×4矩阵是状态转换模型矩阵。独立X-和y -运动,这是矩阵块对角。
当转换到离散时间,你整合在所述时间间隔的长度的运动方程。在离散的形式,对于一个采样间隔Ť,则状态表示形式变为
的数量Xk + 1状态是离散时间的吗k + 1,Xķ是早期离散时间下的状态,ķ。如果包括噪声,方程变得更加复杂,因为噪音的整合并不简单。
状态方程可以推广到
Fķ状态转移矩阵和Gķ是控制矩阵。控制矩阵考虑到作用在物体上的任何已知力。这两个矩阵中给出。最后一项代表类似噪声动态模型的随机扰动。噪声被认为是零均值高斯白噪声。
与输入连续时间系统噪声通过线性随机微分方程描述。与输入离散时间系统噪声通过线性随机微分方程描述。甲状态空间是一个物理系统,其中的输入,输出,和状态变量由一阶耦合方程相关的数学模型。
测量模型
测量是你对你的系统的观察。测量依赖于状态向量,但并不总是与状态向量相同。例如,在雷达系统中,测量可以是球坐标,如距离、方位角和仰角,而状态向量是笛卡尔坐标的位置和速度。对于线性卡尔曼滤波器,测量值总是状态向量的线性函数,排除了球坐标。若要使用球坐标,请使用扩展卡尔曼滤波器。
该测量模型假设任意时刻的实际测量值与当前状态有关
w ^ķ表示在当前时间步骤测量噪声。测量噪声也是零均值高斯白噪声协方差矩阵Q通过描述Qķ= E [nķñķŤ]。
线性卡尔曼滤波方程
在无噪声的情况下,动态方程为
同样,测量模型对测量噪声没有贡献。在每个实例中,过程和测量噪声都是未知的。只有噪声统计是已知的。的
你可以把这些方程放到一个递归循环中来估计状态是如何变化的,以及状态分量的不确定性是如何变化的。
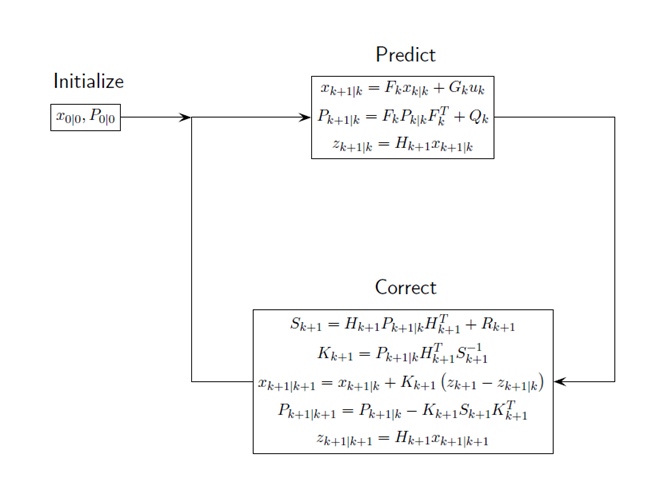
滤波回路
从对这个州的最佳估计开始,X0/0,状态协方差,P0/0。该滤波器执行在连续循环这些步骤。
传播的状态使用运动方程下一步骤。
同样传播协方差矩阵。
下标符号k + 1 | k表示该量是最佳的估计在k + 1从步骤步骤传播ķ。这种估计通常被称为先天的估计。
然后在更新的时间预测测量。
利用实际测量值与预测测量值的差值,在更新时对状态进行修正。校正需要计算卡尔曼增益。要做到这一点,首先要计算测量预测协方差(创新)
那么卡曼增益是
和是由使用最优条件得到的。
校正与测量预测的估计。假设估计是所预测的状态和测量的线性组合。修正后使用下标符号的估计,k + 1 | k + 1。从计算
哪里ķk + 1是卡尔曼增益。正确的状态通常称为后验状态的估计,因为它是在测量之后得到的。
修正状态协方差矩阵
最后,你可以计算基于修正状态的测量。这不是一个校正测量,但什么样的测量将基于状态的最佳估计数进行最佳估计。这相较于实际测量为您提供了过滤器的性能的指示。
此图总结了卡尔曼循环操作。
恒速模型
线性卡尔曼滤波器包含一个内置的线性等速运动模型。可替换地,可以指定为线性运动的转换矩阵。在下一时间步骤中的状态更新为状态的在当前时间的线性函数。在这种过滤器中,测量也由测量矩阵中描述的状态的线性函数。为对象在3-d空间中移动,该状态是由位置和速度在所描述的X- - - - - -,ÿ- 和ž坐标。恒速运动的状态转换模型为
测量模型是状态向量的一个线性函数。最简单的情况是其中的测量是状态的位置的部件。
恒加速模型
线性卡尔曼滤波器包含一个内置的线性恒定加速度运动模型。或者,您可以为恒定加速度的线性运动指定转换矩阵。线性加速度的过渡模型为
最简单的情况是其中的测量是状态的位置的部件。
也可以看看
对象
你也可以从以下列表中选择一个网站: