来自异步传感器的姿态估计
此示例显示了如何以不同的速率熔断传感器来估算姿势。加速度计,陀螺仪,磁力计和GPS用于确定沿圆形路径移动的车辆的取向和位置。您可以在图窗口上使用控件,以改变传感器速率,并在看到对估计姿势的影响时使用传感器丢失进行实验。
模拟设置
加载预先记录的传感器数据。传感器数据基于使用的圆形轨迹WayPointTrajectory.类。属性创建传感器值GPSSensor.和imusvesor.类。的CircularTrajectorySensordata.mat这里使用的文件可以生成generatecirculartrajsensordata.函数。
ld =负载('CircularTrajectorysensordata.mat');Fs = ld.Fs;%最大马格率gpsFs = ld.gpsFs;最大GPS速率%比率= fs./gpsfs;RESHOC = LD.REFLOC;trajorient = ld.trajdata.orientation;trajvel = ld.trajdata.velocity;trajpos = ld.trajdata.position;trajacc = ld.trajdata.acceleration;trajangvel = ld.trajdata.angularvelocity;Accel = ld.accel;gyro = ld.gyro;mag = ld.mag; lla = ld.lla; gpsvel = ld.gpsvel;
融合滤波器
创建一个insfilterasync.熔断IMU + GPS测量。该融合滤波器使用连续离散的扩展卡尔曼滤波器(EKF)来跟踪方向(作为四元数),角速度,位置,速度,加速度,传感器偏差和地磁矢量。
这insfilterasync.有几种处理传感器数据的方法:fuseaccel,fusegyro.,fusemag.和fusegps.因为insfilterasync.使用连续离散的EKF,预测方法可以将过滤器转发到任意时间。
fusionfilt = insfilterAsync (“ReferenceLocation”,回流);
的状态向量insfilterasync.
的insfilterasync.在28元载体中追踪姿势状态。国家是:
状态单位指向方向(四元零件)1:4角速度(XYZ)RAD / S 5:7位置(NED)M 8:10速度(NED)M / S 11:13加速(NED)M / S ^ 2 14:16加速度计偏压(XYZ)M / S ^ 2 17:19陀螺偏压(XYZ)Rad / S 20:22地磁场矢量(NED)UT 23:25磁力计偏差(XYZ)UT 26:28
Ground truth被用来帮助初始化过滤器状态,所以过滤器快速收敛到好的答案。
资产净值= 100;initstate = 0(28日1);initstate(1:4) = compact(meanrot(trajOrient(1:Nav)));initstate(5:7) = mean(trajAngVel(10:Nav,:), 1);initstate(8:10) = mean(trajPos(1:Nav,:), 1);initstate(11:13) = mean(trajVel(1:Nav,:), 1);initstate(14:16) = mean(trajAcc(1:Nav,:), 1);initstate (23:25) = ld.magField;Z轴的陀螺仪偏置初始值估计值低。这是%的结果,以说明融合磁强计的影响% 模拟。Initstate (20:22) = deg2rad([3.125 3.125 3.125]);fusionfilt。状态= initstate;
设置过程噪声值insfilterasync.
过程噪声方差描述了滤波器使用的运动模型的不确定性。
fusionfilt.quaternionnoise = 1e-2;fusionfilt.angularvelocitynoise = 100;Fusionfilt.accelerationNoise = 100;Fusionfilt.MagnetomerBiasnoise = 1E-7;fusionfilt.accelerometerbiasnoise = 1e-7;fusionfilt.gyroscopybiasnoise = 1e-7;
定义用于融合传感器数据的测量噪声值
每个传感器在测量中都有一些噪声。这些值通常可以在传感器的数据表中找到。
Rmag = 0.4;Rvel = 0.01;Racc = 610;Rgyro = 0.76 e-5;rpo = 3.4;fusionfilt。StateCovariance =诊断接头(1 e - 3 * 1(28日1));
初始化范围
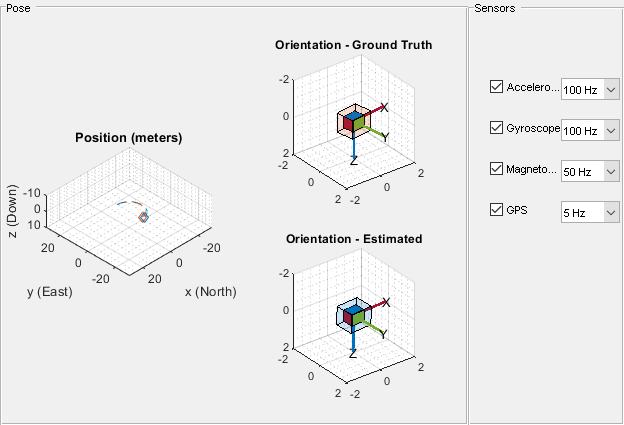
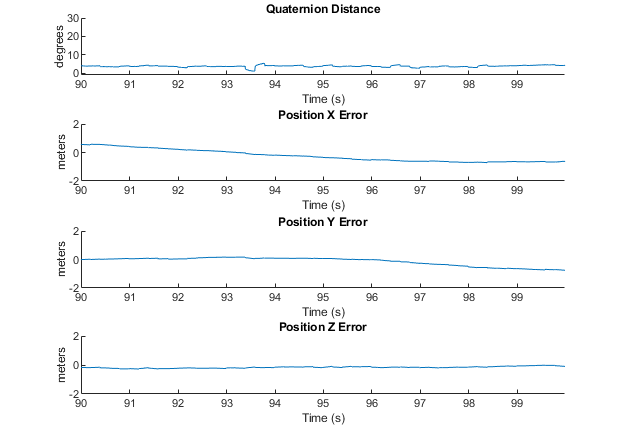
的HelperScrollingPlotter范围使得能够随着时间的推移绘制变量。这里用于跟踪姿势的错误。的PoseViewerWithSwitches.范围允许三维可视化的滤波器估计和地面真实的姿态。示波器会减慢模拟速度。若要禁用作用域,请将相应的逻辑变量设置为false。
umererrscope = true;%打开流误差绘图。usePoseView = true;%打开3D姿势查看器。如果usePoseView posescope = PoseViewerWithSwitches(...“XPositionLimits”, 30 [-30],...'ypositionLimits',[-30,30],...'zpositionlimits',[-10 10]);结束f = gcf;如果usererrscope errscope = HelperScrollingPlotter(...'numinputs'4...“时间间隔”10,...“SampleRate”Fs,...'ylabel',{“度”,...“米”,...“米”,...“米”},...'标题',{'四元距离',...'位置x错误',...'位置y错误',...“Z位置错误”},...“YLimits”,...[- 1,30 - 2,2 - 2,2 -2]);结束
仿真环路
融合算法的仿真可以让你检查传感器采样率变化的影响。此外,可以通过取消对应的复选框来防止单个传感器的融合。这可以用来模拟传感器辍学。
有些配置会产生戏剧性的结果。例如,关闭GPS传感器会导致位置估计快速漂移。关闭磁强计传感器将导致估计方向缓慢偏离地面真相,因为估计旋转得太快。相反,如果陀螺仪被关闭,而磁力计被打开,估计的方向显示一个摆动,缺乏平滑性,如果使用两个传感器。
打开所有传感器,但将它们以最低速率运行产生估计值明显地从地面真理偏离,然后在传感器融合时返回更正确的结果。这是最容易看到的HelperScrollingPlotter的运行估计误差。
主要模拟在100 Hz时运行。每次迭代都在图窗口上检查复选框,如果传感器已启用,则以适当的速率熔化该传感器的数据。
为II = 1:尺寸(Accel,1)Fusionfilt.predict(1./fs);%保险丝加速度计如果(f.UserData.Accelerometer) & &...mod(ii, fix(Fs/ f.s erdata . accelerometersamplerate)) == 0 fusion .fuseaccel(accel(ii,:), Racc);结束%保险丝陀螺仪如果(f.userdata.gyroscope)&&...mod(ii,fix(fs / f.userdata.gyroscopeSamplerge))== 0 fusionfilt.fusegyro(陀螺(ii,:),rgyro);结束%保险丝磁力计如果(f.UserData.Magnetometer)&&...mod(ii, fix(Fs/ f.s erdata . magnetometersamplerate)) == 0结束%融合GPS如果(f.UserData.GPS) && mod(ii, fix(Fs/f.UserData.GPSSampleRate)) == 0 fusion .fusegps(lla(ii,:), Rpos, gpsvel(ii,:), Rvel);结束%绘制姿势错误[p,q] =姿势(Fusionfilt);Posescope(p,q,trajpos(ii,:),trajorient(ii));Orienterr = Rad2deg(dist(q,trajorient(ii)));poserr = p - trajpos(ii,:);errscope(东方,poserr(1),poserr(2),poserr(3));结束
结论
的insfilterasync.允许各种不同的采样率。估计输出的质量很大程度上取决于单个传感器的融合率。任何传感器的丢失都会对输出产生深远的影响。
您还可以从以下列表中选择一个网站: