locallapfilt
图像的快速局部拉普拉斯滤波
描述
例子
利用局部拉普拉斯滤波提高RGB图像的局部对比度
导入RGB镜像
A = imread(“peppers.png”);
设置过滤器的参数,将细节增加到小于0.4。
Sigma = 0.4;Alpha = 0.5;
使用快速局部拉普拉斯滤波
B = locallapfilt(A, sigma, alpha);
并排显示原始和过滤图像。
imshowpair (A, B,“蒙太奇”)

增加局部对比度,平衡速度和质量
局部拉普拉斯滤波是一种计算量很大的算法。为了加快处理速度,locallapfilt通过将强度范围离散成由'定义的多个样本,近似算法。NumIntensityLevels的参数。这个参数可以用来平衡速度和质量。
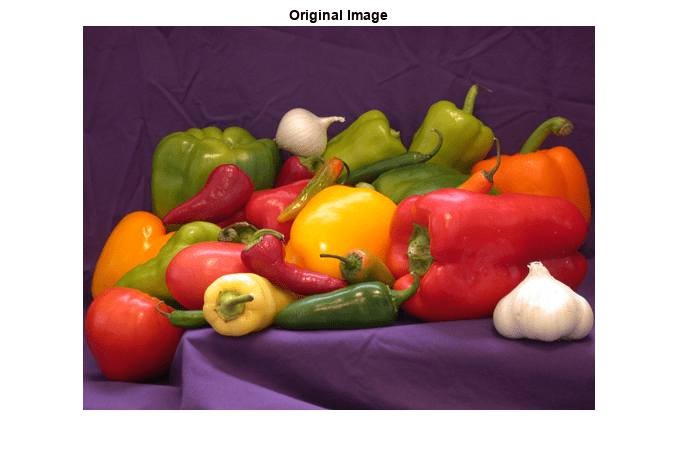
导入RGB图像并显示它。
A = imread(“peppers.png”);图imshow(A)标题(原始图像的)
使用一个σ值来处理详细信息和α值增加对比度,有效增强图像的局部对比度。
Sigma = 0.2;Alpha = 0.3;
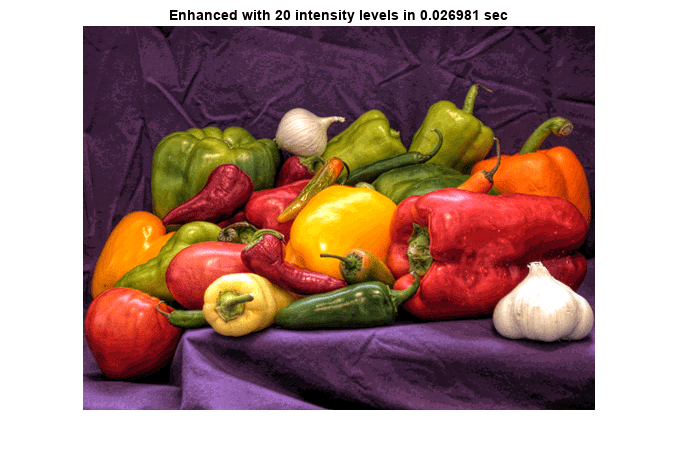
使用更少的样本可以提高执行速度,但是会产生可见的工件,特别是在扁平对比的区域。仅使用20个强度级别对函数进行计时。
t_speed = timeit(@() localapfilt (A, sigma, alpha,“NumIntensityLevels”, 20))
T_speed = 0.1629
现在,处理并显示图像。
B_speed = locallapfilt(A, sigma, alpha,“NumIntensityLevels”, 20);图imshow(B_speed) title([增强了20个强度等级num2str (t_speed)“秒”])
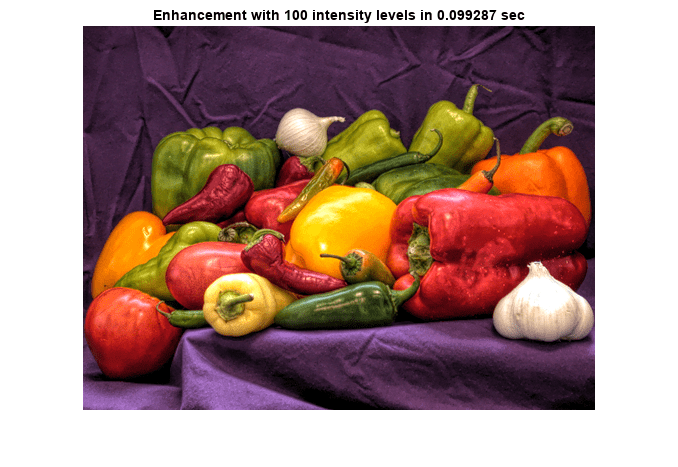
大量的样本会产生更好的结果,但需要花费更多的处理时间。使用100个强度级别对函数进行计时。
t_quality = timeit(@() localapfilt (A, sigma, alpha,“NumIntensityLevels”, 100))
T_quality = 0.7390
处理100个强度级别的图像并显示它:
B_quality = localapfilt (A, sigma, alpha,“NumIntensityLevels”, 100);图imshow(B_quality) title([“增强100级强度”num2str (t_quality)“秒”])
试着在你自己的图像上改变强度等级的数量。试着把对比压平(用α> 1).你会看到,每个图像的最佳强度级别的数量是不同的,随着α.默认情况下,locallapfilt使用启发式来平衡速度和质量,但它不能预测每个图像的最佳值。
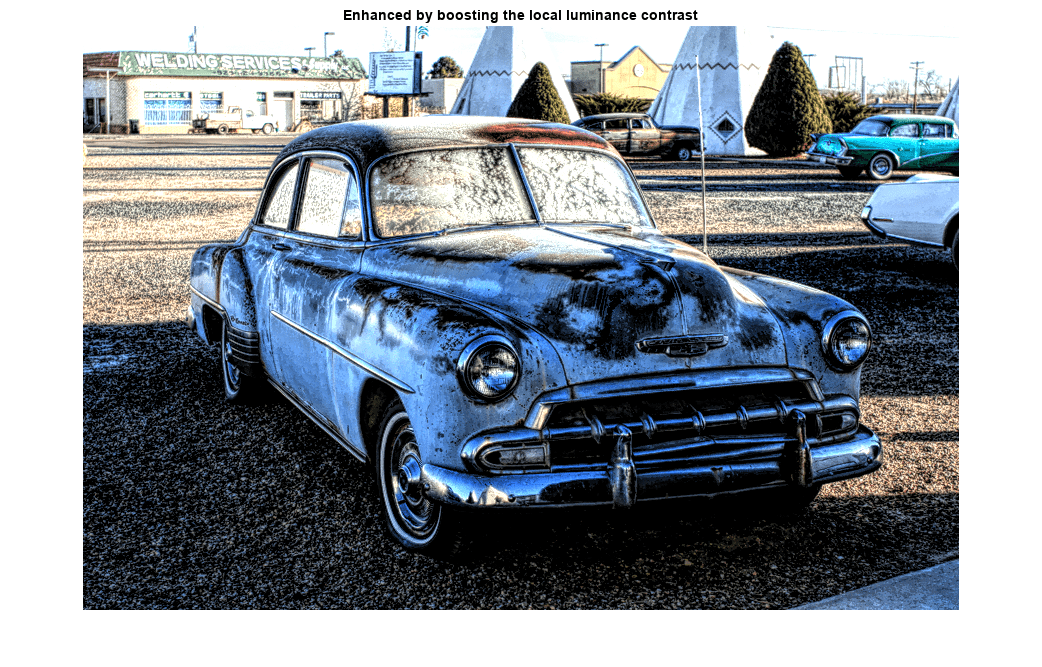
使用ColorMode增强局部颜色对比度
导入彩色图像,缩小其大小,并显示它。
A = imread(“car2.jpg”);A = imresize(A, 0.25);图imshow(A)标题(原始图像的)
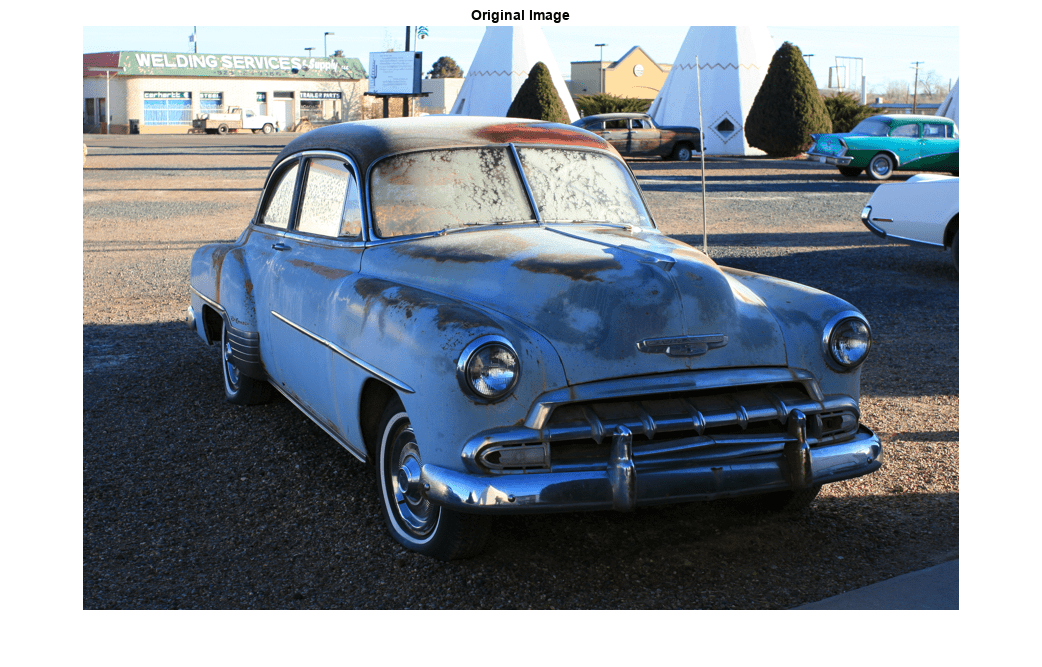
将过滤器的参数设置为大幅增加小于0.3的细节(从0到1的规范化范围之外)。
Sigma = 0.3;Alpha = 0.1;
让我们比较两种不同的颜色过滤模式。通过过滤图像的强度和分别过滤每个颜色通道来处理图像:
B_luminance = locallapfilt(A, sigma, alpha);B_separate = locallapfilt(A, sigma, alpha,“ColorMode”,“独立”);
显示过滤后的图像。
图imshow(B_luminance)“通过提高局部亮度对比度来增强”)
图imshow(B_separate) title(“通过增强局部颜色对比来增强效果”)
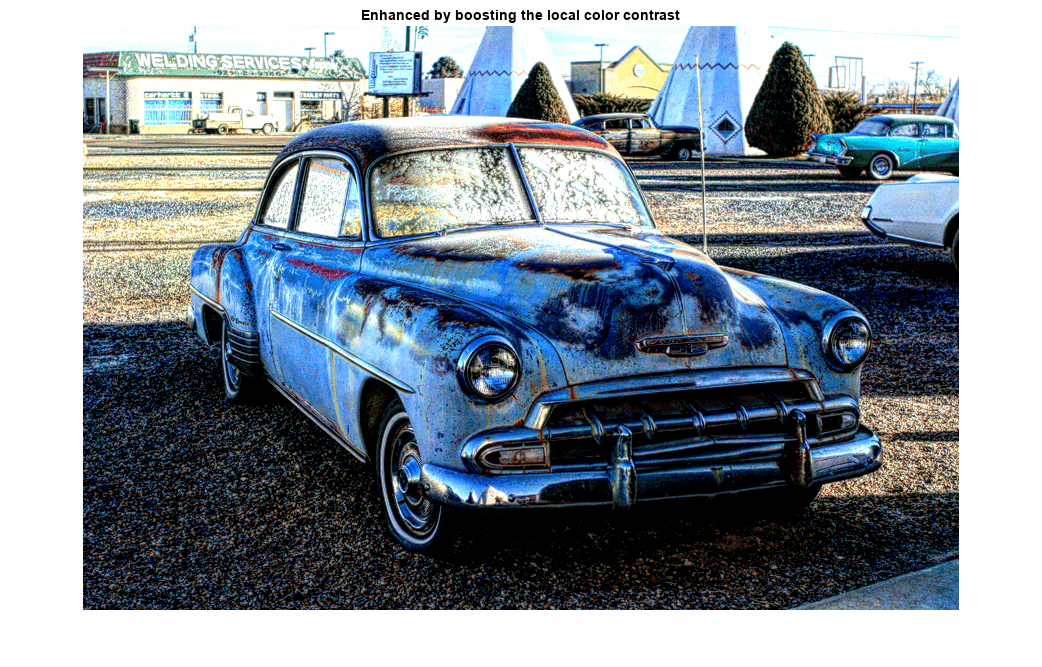
每一张图片都使用了等量的对比度增强,但在设置时颜色会更饱和。ColorMode“到”单独的”。
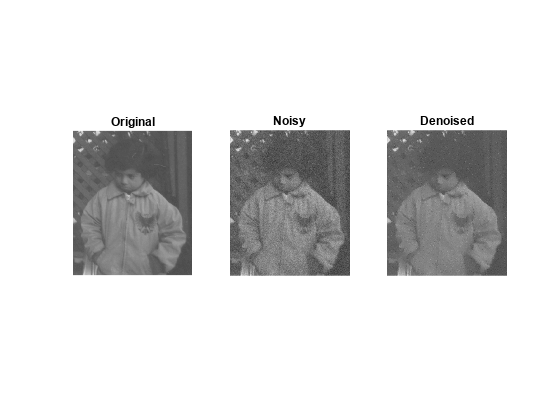
执行边缘感知降噪
导入图像。将图像转换为浮点数,这样我们可以更容易地添加人工噪声。
A = imread(“pout.tif”);A = im2single(A);
添加均值为零,方差为0.001的高斯噪声。
A;“高斯”, 0, 0.001);psnr_noise = psnr(a_noise, A);流('噪声图像的峰值信噪比为%0.4f\n', psnr_noisy);
噪声图像的峰值信噪比为30.0234
将细节的振幅设置为平滑,然后设置要应用的平滑量。
Sigma = 0.1;Alpha = 4.0;
应用边缘感知过滤器。
B = locallapfilt(a_noise, sigma, alpha);psnr_降噪= psnr(B, A);流(去噪后图像的峰值信噪比为%0.4f\n', psnr_denoised);
去噪后图像的峰值信噪比为32.2016
注意图像的PSNR的改进。
并排显示所有三个图像。观察细节是光滑的,沿边缘的尖锐强度变化是不变的。
图subplot(1,3,1), imshow(A), title(“原始”) subplot(1,3,2), imshow(a_noise), title(“吵”) subplot(1,3,3), imshow(B), title(“去噪”)
平滑图像细节,不影响边缘锐度
导入图像,调整其大小并显示它
A = imread(“car1.jpg”);A = imresize(A, 0.25);图imshow(A)标题(原始图像的)

这辆车又脏又脏,到处都是记号。我们试着擦掉尸体上的灰尘和标记。将细节的振幅设置为平滑,并设置大量的平滑应用。
Sigma = 0.2;Alpha = 5.0;
当平滑(α> 1),滤波器产生高质量的结果与少量的强度级别。设置少量的强度级别以更快地处理图像。
numLevels = 16;
涂抹滤镜。
B = locallapfilt(A, sigma, alpha,“NumIntensityLevels”, numLevels);
展示“干净”的汽车。
图imshow(B)标题(“在平滑细节之后”)

输入参数
输出参数
参考文献
[1]帕里斯,西尔万,塞缪尔·w·哈西诺夫,简·考茨。局部拉普拉斯滤波器:基于拉普拉斯金字塔的边缘感知图像处理, ACM Trans。图30.4(2011):68。
[2] Aubry, Mathieu等。快速局部拉普拉斯滤波器:理论与应用.ACM图形学报(TOG) 33.5(2014): 167。
您也可以从以下列表中选择网站:
