RGB2IND.
将RGB图像转换为索引图像
描述
例子
将RGB图像转换为索引图像
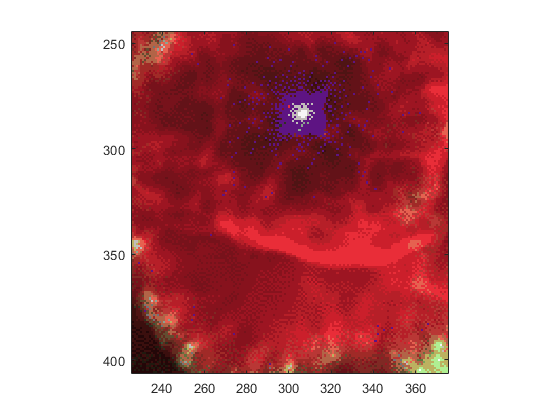
读取并显示一个真实的颜色uint8一个星云的JPEG图像。
rgb = imread(“ngc6543a.jpg”);图ImageC(RGB)轴图像变焦(4)

将RGB转换为32种颜色的索引图像。
[IND,MAP] = RGB2IND(RGB,32);图ImageC(IND)ColorMap(MAP)轴图像变焦(4)
输入参数
输出参数
算法
统一量化-如果你指定
托尔,然后RGB2IND.使用均匀量化转换图像。均匀量化将RGB颜色立方体切成较小的长度托尔.例如,如果您指定托尔,则立方体的边是RGB立方体长度的十分之一。小立方体的总数为:t =(地板(1 / tol) + 1) ^ 3
每个立方体在输出图像中代表一种颜色。因此,
t是颜色映射的最大长度。RGB2IND.删除输入图像中没有出现的任何颜色,因此实际的颜色映射可以小于t.最小方差量化 - 如果指定
问,然后RGB2IND.使用最小方差量化。最小方差量化将RGB颜色立方体切割成不同尺寸的较小框(不一定立方体),具体取决于颜色如何分布在图像中。如果输入图像实际上使用比指定的号码更少,则输出ColorMap也更小。反转颜色映射-如果你指定了一个输入颜色映射
镜片,然后RGB2IND.使用colormap映射。反向颜色映射算法将指定的颜色映射量化为每个颜色组件的32个不同级别。然后,对于输入图像中的每个像素,在量化颜色图中找到最接近的颜色。
参考
[1]斯宾塞W. Thomas,“有效逆色地图计算”,图形宝石二世[李建平主编。中国社会科学[m] .北京:科学出版社,2002 .](包括源代码)
在R2006A之前介绍
您还可以从以下列表中选择一个网站:
