增加角分辨率MIMO雷达
这个例子介绍了如何在MIMO雷达中形成一个虚拟阵列来帮助提高角分辨率。它展示了如何使用相控阵系统工具箱™模拟一个相干MIMO雷达信号处理链。
介绍
多输入多输出(MIMO)雷达有两类。第一类是多基地雷达。它们通常被称为统计MIMO雷达。相干MIMO雷达属于第二类,是本例的重点。相干MIMO雷达信号处理的一个优点是能够通过形成虚拟阵列来提高物理天线阵列的角分辨率。
虚拟阵列
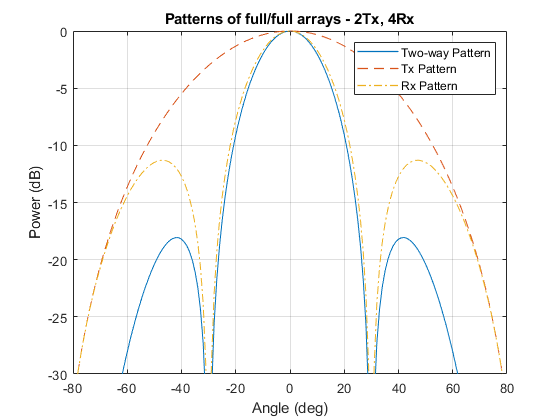
虚拟阵列可通过准单基地雷达MIMO,其中发射与接收阵列位置靠近被创建。为了更好地了解虚拟阵列的概念,在现有的相控阵雷达的双向图案的第一外观。相控阵雷达的双向图案是其发射阵列图案的产品和接收阵列图案。例如,考虑具有2元件的发射阵列和4-元件的77GHz的毫米波雷达接收阵列。
fc = 77 e9;c = 3 e8;λ= c / fc;元= 2;Nr = 4;
如果两个阵列具有半波长的间距,其有时被称为全阵列,则图案双向接近接收阵列图案。
dt =λ/ 2;博士=λ/ 2;txarray = phased.ULA (Nt, dt);rxarray = phased.ULA (Nr、博士);ang = 90:90;pattx =模式(txarray、fc和0“类型”,“powerdb”);patrx =模式(rxarray、fc和0“类型”,“powerdb”);pat2way = pattx + patrx;helperPlotMultipledBPattern(ang,[pat2way pattx patrx],[- 300],...{“双向模式”,“的Tx模式”,“处方模式”},...“全/全阵列模式 - 的2Tx,4RX”,...{' - ',“——”,“-”。});
如果完整的发射阵列被替换为薄的阵列,这意味着该元件间距大于半波长更宽,则图案双向具有较窄的波束宽度。请注意,即使在薄发射阵列已经栅瓣,这些栅瓣不存在于所述双向模式。
dt = Nr *λ/ 2;txarray = phased.ULA (Nt, dt);pattx =模式(txarray、fc和0“类型”,“powerdb”);pat2way = pattx + patrx;helperPlotMultipledBPattern(ang,[pat2way pattx patrx],[- 300],...{“双向模式”,“的Tx模式”,“处方模式”},...“薄/全阵列模式- 2Tx, 4Rx”,...{' - ',“——”,“-”。});
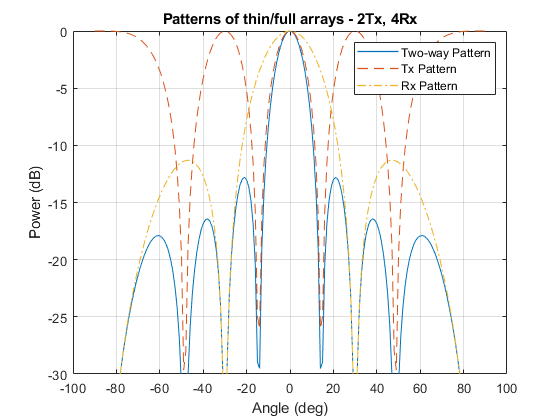
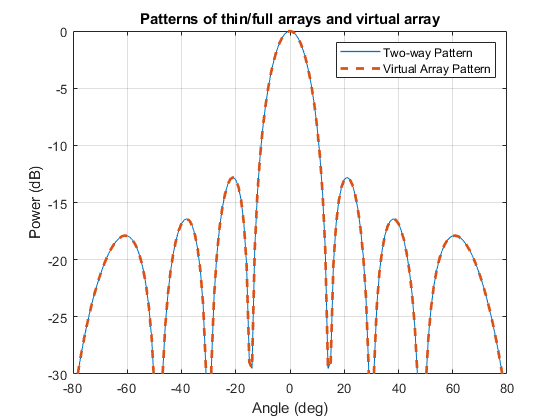
该系统的双向模式对应于用2×4 = 8种元素的虚拟接收阵列的图案。因此,通过仔细地选择发射的几何形状和接收阵列,我们可以增加系统的角分辨率,而不增加更多的天线阵列。

VARRAY = phased.ULA(NT * NR,DR);PATV =图案(VARRAY,FC,ANG,0,“类型”,“powerdb”);helperPlotMultipledBPattern (ang, [pat2way patv], [-30 0],...{“双向模式”,“虚拟阵列模式”},...“薄/全阵列模式和虚拟阵列”,...{' - ',“——”},[1 2]);
在MIMO雷达虚拟阵列
在相干MIMO雷达系统,发射阵列的每个天线发射的正交波形。由于这种正交性,能够在接收阵列以恢复所发送的信号。在物理测量接收对应于每个正交波形然后可以堆叠以形成虚拟阵列的测量阵列。

注意,由于在发射阵列每个辐射元件独立地,没有发射波束成形,以便发送模式是广泛的,并覆盖的视场(FOV)大场。这使得在FOV所有目标的同时照射。然后接收阵列可以产生多个波束来处理所有目标回波。相比于需要连续扫描以覆盖整个FOV传统的相控阵雷达,这是需要快速反应时间的应用MIMO雷达的另一优点。
TDM-MIMO雷达仿真
时分复用(TDM)是发射通道之间实现正交性的方法之一。所述的该实施例中示出了剩余部分如何建模和模拟TDM-MIMO频率调制连续波(FMCW)汽车雷达系统。波形特征是从通过汽车自适应巡航控制系统使用FMCW技术例。
波形= helperDesignFMCWWaveform(C,拉姆达);FS = waveform.SampleRate;
试想一下,有两辆车在FOV为20度的分离。如本实施例的前面的阵列图案曲线看到的,4元件的3dB波束宽度接收阵列是大约30度,使得传统的处理将不能够对两个目标在角度域中分开。雷达传感器参数如下:
发射机= phased.Transmitter(“PeakPower”0.001,'获得',36);接收机= phased.ReceiverPreamp('获得'40,“NoiseFigure”,4.5“SampleRate”,FS);txradiator = phased.Radiator(“传感器”txarray,“OperatingFrequency”,FC,...'PropagationSpeed',C,“WeightsInputPort”,真正的);rxcollector = phased.Collector (“传感器”rxarray,“OperatingFrequency”,FC,...'PropagationSpeed'c);
定义自身车辆的位置和运动以及两辆汽车在FOV中。
radar_speed = 100 *3600分之1000;%自我车速100公里每小时radarmotion = phased.Platform('初始位置'(0,0,0.5),“速度”,radar_speed, 0, 0);car_dist = [4050];传感器和汽车之间的距离%(米)car_speed = [- 8096]*1000/3600;% km/h -> m/scar_az = [-10 10];car_rcs = [20 40];car_pos = [car_dist * COSD(car_az); car_dist *信德(car_az); 0.5 0.5]。汽车= phased.RadarTarget(“MeanRCS”car_rcs,'PropagationSpeed',C,“OperatingFrequency”,FC);carmotion = phased.Platform('初始位置'car_pos,“速度”[car_speed; 0 0 0 0]);
传播模型被假定为自由空间。
信道= phased.FreeSpace('PropagationSpeed',C,...“OperatingFrequency”,FC,“SampleRate”,FS,'TwoWayPropagation',真正的);
由TDM MIMO雷达的物理阵列接收的原始数据立方体然后可模拟如下:
RNG(2017);Nsweep = 64;DN = 2;%大量毁灭的因素fs = fs / Dn;xr =复杂(0 (f * waveform.SweepTime、Nr、Nsweep));w0 = [0, 1];%的权重,以启用/禁用的辐射元件为m = 1: Nsweep%更新雷达和目标位置[radar_pos,radar_vel] = radarmotion(waveform.SweepTime);[tgt_pos,tgt_vel] = carmotion(waveform.SweepTime);[〜,tgt_ang] = rangeangle(tgt_pos,radar_pos);%发射FMCW波形SIG =波形();txsig =发射机(SIG);%切换发射元件W0 = 1-W0;txsig = txradiator(txsig,tgt_ang,W0);%传播的信号,并反射离开目标txsig =信道(txsig,radar_pos,tgt_pos,radar_vel,tgt_vel);txsig =汽车(txsig);对收到的雷达回波信号进行解码rxsig = rxcollector(txsig,tgt_ang);rxsig =接收机(rxsig);dechirpsig =解线调(rxsig,SIG);%抽取,以减少计算要求的回报为N =尺寸(XR,2): - 1:1个XR(:,N,M)=抽取(dechirpsig(:,N),DN,“杉”);结束结束
虚拟阵列处理
物理阵列接收到的数据集必须经过处理才能形成虚拟阵列数据集。对于本例中使用的TDM-MIMO雷达系统,两个发射天线单元对应的测量值可以通过取数据立方体的每一页从两个连续扫描中恢复。
Nvsweep = Nsweep / 2;XR1 = XR(:,:,1:2:结束);XR2 = XR(:,:,2:2:结束);
现在数据立方体进来了XR1包含与第一个发射天线元素相对应的返回,以及其中的数据立方体XR2包含与第二个发射天线单元对应的返回。因此,虚拟数组中的数据立方体可以形成如下形式:
XRV =猫(2,XR1,XR2);
接着,对虚拟数据立方体进行距离多普勒处理。因为距离多普勒处理是线性的,相位信息被保持。因此,所得的反应可以在以后用于在虚拟孔径执行进一步的空间处理。
nfft_r = 2 ^ nextpow2(大小(XRV,1));nfft_d = 2 ^ nextpow2(大小(XRV,3));rngdop = phased.RangeDopplerResponse('PropagationSpeed',C,...'DopplerOutput',“速度”,“OperatingFrequency”,FC,“SampleRate”,FS,...'RangeMethod',FFT的,'PRFSource',“属性”,...'RangeWindow',“汉娜”,'PRF'1 / (Nt * waveform.SweepTime),...“SweepSlope”,waveform.SweepBandwidth / waveform.SweepTime,...'RangeFFTLengthSource',“属性”,'RangeFFTLength'nfft_r,...'DopplerFFTLengthSource',“属性”,“DopplerFFTLength”,nfft_d,...'DopplerWindow',“汉娜”);[RESP,R,SP] = rngdop(XRV);
所结果的RESP是包含用于虚拟阵列中的每个元件的范围内多普勒响应数据立方体。作为说明,示出了距离多普勒地图为虚拟阵列中的第一个元素。
plotResponse(rngdop,挤压(XRV(:,1,:)));
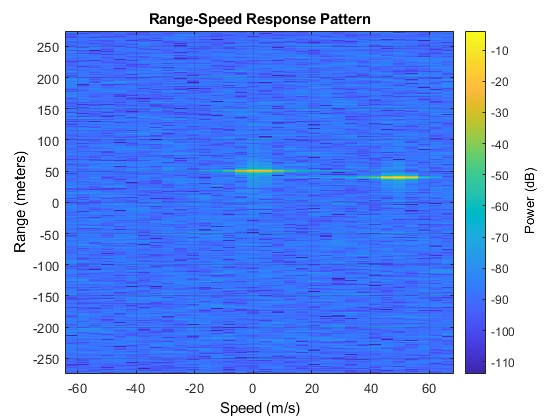
可在距离多普勒地图上从每对发射进行检测和接收元件,以确定在场景中的目标。在这个例子中,在第一发射元件之间所获得的地图上执行一个简单的基于阈值的检测和第一接收元件,其对应于在虚拟阵列中的第一个元素的测定。基于在先前的图中所示的范围,多普勒地图上,该阈值的最大峰值下面设定为10分贝。
respmap =挤压(mag2db(ABS(RESP(:,1,:))));ridx = helperRDDetection(respmap,-10);
基于该目标所检测到的范围,相应的范围切口可以从虚拟阵列数据立方体中提取执行进一步的空间处理。要验证虚拟阵列相比于物理阵列提供更高的分辨率,下面提取的代码的范围内削减两个靶并且将它们组合成一个单一的数据矩阵。所述beamscan算法然后经这些虚拟阵列测量来执行以估计目标的方向。
XV =挤压(总和(RESP(ridx,:,:),1))';DOA = phased.BeamscanEstimator(“SensorArray”,VARRAY,'PropagationSpeed',C,...“OperatingFrequency”,FC,'DOAOutputPort',真正,'NumSignals',2,“ScanAngles”(ang);[Pdoav,target_az_est] = DOA(XV);fprintf中('target_az_est = [%S] \ N'num2str (target_az_est));
target_az_est = [-6 10]
两个目标成功分离。两辆车的实际角度分别是-10度和10度。
下图比较从虚拟和物理空间频谱接收阵列。
doarx = phased.BeamscanEstimator (“SensorArray”rxarray,'PropagationSpeed',C,...“OperatingFrequency”,FC,'DOAOutputPort',真正,“ScanAngles”(ang);Pdoarx = doarx (xr);helperPlotMultipledBPattern (ang mag2db (abs ([Pdoav Pdoarx])), (-30 0),...{“虚拟阵列”,“数组”的身体},...“虚拟阵列和物理阵列的空间频谱”{' - ',“——”});
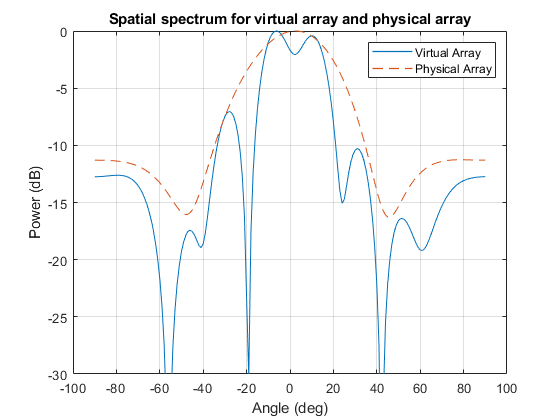
在本例中,检测是在距离-多普勒图上进行的,不需要对虚拟阵列数据立方体进行空间处理。这是因为信噪比高。如果信噪比较低,也可以在检测前对整个距离-多普勒图上的虚拟阵列进行盲处理,使信噪比达到最大。
相位编码MIMO雷达
尽管TDM-MIMO雷达的处理链是相对简单的,它仅使用一个发射天线在同一时间。因此,它没有考虑在发射阵列的全部容量的优点。为了提高效率,也有可在MIMO雷达可以使用其它的正交波形。
使用相同的配置作为示例,实现正交性的一种方案是让一个元素始终传输相同的FMCW波形,而第二个传输元素在每次扫描时反转FMCW波形的相位。这样,两个发射元素在所有扫描中都是活动的。对于第一次扫描,两个元件传输相同的波形,对于第二次扫描,两个元件传输相反相位的波形,依此类推。这本质上是用Hadamard代码对来自不同元素的连续扫描进行编码。它类似于在MIMO通信系统中使用的Alamouti代码。
MIMO雷达还可以采用在MIMO雷达相位编码波形。在这种情况下,每个辐射元件可以发送唯一的编码波形,然后将接收器可具有对应于各相的那些编码波形的匹配滤波器组。然后信号可以被回收和处理,以形成虚拟阵列。
总结
在本例中,我们简要介绍了相干MIMO雷达和虚拟阵列的概念。我们使用2元发射阵列和4元接收阵列模拟MIMO雷达的返回,并使用8元虚拟阵列对两个紧密间隔目标的模拟回波进行到达方向估计。
参考文献
[1]弗兰克罗比,等。MIMO雷达理论和实验结果,《第三十八届阿西洛玛信号、系统和计算机会议记录》,加利福尼亚,第300-304页,2004年。
[2]以利布鲁克纳,MIMO雷达及其常规等价物,IEEE雷达会议,2015年。
[3]Sandeep饶,MIMO雷达德州仪器应用报告SWRA554,2017年5月。
李健和彼得·斯托伊卡,MIMO雷达信号处理,John Wiley和Sons,2009年。
您还可以选择从下面的列表中的网站: