使用自动校准,可以迁就阵列的不确定性
此示例示出了基于受约束的优化过程的自校准程序。机会的来源被利用同时估计阵列形状的不确定性和源方向。
这个例子需要优化工具箱™。
介绍
在理论上,人们可以设计出完美均匀线性阵列(ULA),以执行各种处理,诸如波束成形或到来方向估计。典型地,这阵列将在受控环境中进行部署之前进行校准。然而,不确定性可能在系统中指示所述阵列需要重新校准操作过程中出现。例如,环境影响可能导致阵列元素位置成为扰动,引入阵列形状的不确定性。这些不确定性的存在导致的阵列处理算法的检测,分辨率和估计性能快速降解。因此,至关重要的,以尽快除去这些阵列的不确定性。
有许多阵列校准算法。本实施例中着眼于一类其中,自校准(也称为自动校准),其中不确定性与未知的地址[1]的数的外部源的位置联合估计。不同于导频校准,这允许阵列被重新校准以不太知道的环境。然而,在一般情况下,这会导致少数信号观测有大量的未知数。有许多的方法,如[2]中描述的解决该问题。一种方法是构造和优化对成本函数。这些成本函数往往是高度非线性的,含有局部极小。在这个例子中,在形成基于所述多重信号分类(MUSIC)算法[3]的成本函数,解决如使用优化工具箱(TM)的fmincon优化问题。在文献中,许多其它的组合也是存在的[2]。
完美阵列
首先考虑与半波长间隔的5-元件ULA操作被部署。在这样的阵列中,元件的位置可以容易地计算出来。
N = 5;designed_pos = [零(1,N);-( N-1)/ 2:(N-1)/ 2;零(1,N)] * 0.5;
一个不那么完美的阵
接下来,假定该阵列被扰乱而在运行等经历阵列形状的不确定性在x和y维度。为了固定全局轴,假设如在[4]中规定的到第二传感器,第一传感器和方向是已知的。
RNG默认pos_std = 0.02;perturbed_pos = designed_pos + pos_std * [randn(2,N);零(1,N)];perturbed_pos(:,1)= designed_pos(:,1);%基准传感器没有%的不确定性perturbed_pos(1,2)= designed_pos(1,2);%x轴由固定下来%假定的x位置%另一个传感器是已知的
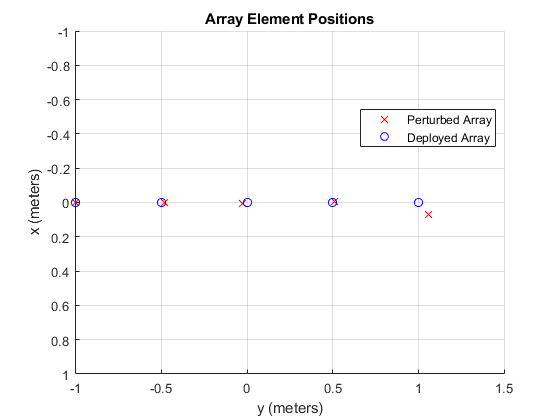
可视化的阵列缺陷
下图显示了在展开和所述扰动阵列之间的差异。
helperCompareArrayProperties('位置',perturbed_pos,designed_pos,...{“扰动阵”,“部署阵”});视图(90,90);
DOA估计的退化
在上一节示出了部署阵列,并且具有在操作时经历的干扰的阵列之间的差异。如果一个盲目地使用设计用于展开阵列的处理中,阵列的性能降低。例如,考虑一个beamscan估计器被使用在-20,40和85度方位角来估计的3个未知源的方向。
%生成100K样本30分贝SNRncov = db2pow(-30);Nsamp = 1E5;快照的数目%(样品)incoming_az = [-20,40,85];%待估计未知源位置M =长度(incoming_az);[x_pert,〜,RXX] = sensorsig(perturbed_pos,Nsamp,incoming_az,ncov);%的估计的源的方向乌拉= phased.ULA('包含numElements',N);spatialspectrum = phased.BeamscanEstimator('SensorArray',乌拉,...'DOAOutputPort',真正,'NumSignals',M);[Y,estimated_az] = spatialspectrum(x_pert);incoming_az
incoming_az =1×3-20 40 85
estimated_az
estimated_az =1×3-19 48 75
这些不确定性降低阵列的性能。自校准可以允许阵列是使用机会的来源重新校准,而无需知道它们的位置。
自校准
许多自校准方法是基于优化的成本函数来联合估计未知阵列和源参数(例如,阵列传感器和源位置)。成本函数和优化算法必须慎重选择,以鼓励要达到那样轻易地,尽快全球性解决方案。此外,与优化算法相关的参数必须进行调整以给定的情景。许多成本函数和优化算法的组合的在文献中存在。对于此示例场景中,MUSIC成本函数[3]被选择的旁边fmincon优化算法。随着剧情的变化,也可适当使用取决于校准算法的鲁棒性,以适应方法。例如,在这个例子中,校准算法的性能,从源端射或的数组元素的数目增加移开下降。先前估计源位置的初始估计被用作优化过程的初始化判据。
有趣= @(x_in)helperMUSICIteration(x_in,RXX,designed_pos);nvars = 2 * N - 3 + M;%假设2D的不确定性X0 = [0.1 * randn(1,nvars-M),estimated_az];% 初始值locTol = 0.1;%位置公差angTol = 20;%角度公差磅= [-locTol *酮(nvars-M,1); estimated_az .'- angTol];%下界UB = [locTol *酮(nvars-M,1); estimated_az'+ angTol];%的上限选项= optimoptions('fmincon','TolCon',1E-6,'DerivativeCheck','上',...'显示',“关”);[X,FVAL,exitflag] = fmincon(乐趣,X0,[],[],[],[],LB,UB,[],选项);%解析最终结果[〜,perturbed_pos_est,postcal_estimated_az] = helperMUSICIteration(...的x,RXX,designed_pos);
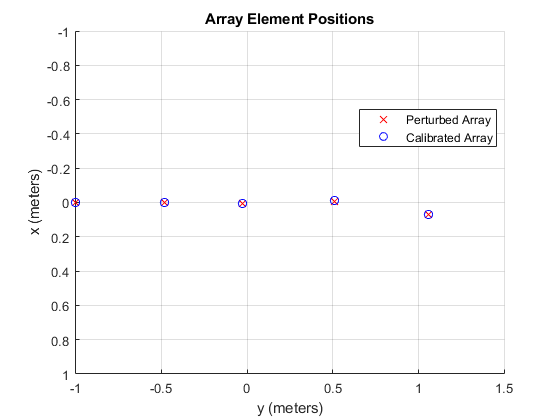
helperCompareArrayProperties('位置',perturbed_pos,perturbed_pos_est,...{“扰动阵”,“校准阵列”});视图(90,90);
polarplot(deg2rad(incoming_az),[1 1 1],'S',...deg2rad(postcal_estimated_az(1,:)),[1 1 1],'+',...deg2rad(estimated_az),[1 1 1],'O','行宽',2,'MarkerSize',10)图例(“真正的方向”,“校准后DOA”,...“校准前DOA”,'位置',[0.01 0.02 0.3 0.13])RLIM([0 1.3])
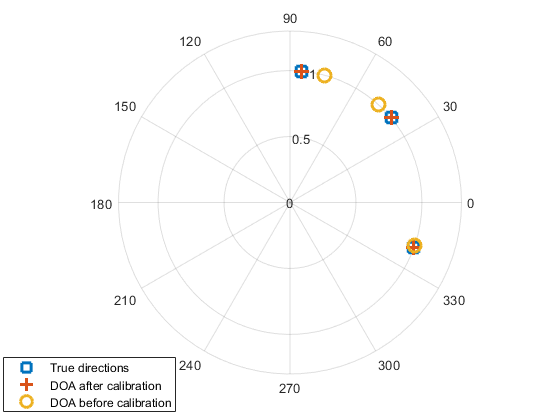
通过执行该校准过程中源估计的准确度已显著提高。此外,扰动传感器的位置也被估计,其可被用作在将来新阵列的几何形状。
摘要
此示例示出了如何阵列形状的不确定性可能会影响到估计的未知源到达的方向的能力。该实施例还说明自校准如何可以被用来克服这些扰动的影响,并且同时估计这些不确定性。
参考
[1]范树木,H.优化阵列处理。纽约:威利 - InterScience的,2002年。
[2] E Tuncer和B弗里德兰德。方向波达古典与现代的估计。爱思唯尔,2009年。
[3]施密特,R. O.“多发射位置和信号参数估计”。IEEE交易天线与传播。卷。AP-34,1986年3月,页276-280。
[4] Y. Rockah和P. M. Schultheiss。阵形校准使用未知locations-第一部分来源:远场源。硕士论文。ASSP,35:286-299,1987。
您还可以选择从下面的列表中的网站: