多普勒频移和脉冲多普勒处理
万博1manbetx支持脉冲多普勒处理
信号源和接收机之间的相对运动产生的频率变化波形。测量这多普勒转变提供了一个估计的相对移动目标的径向速度。
对于一个窄带信号以光的速度传播,赫兹的单向多普勒频移是:
在哪里v是目标的相对径向速度对发射机。接近目标接收方,多普勒频移是正的。对于发射机的目标渐行渐远,多普勒频移是负的。
您可以使用speed2dop将相对径向速度多普勒频移的赫兹。您可以使用dop2speed确定一个目标的径向速度相对于基于观察到的多普勒频移的接收器。
转换速度多普勒频移
假设目标方法固定接收器径向速度为23.0米/秒。目标反映了一种窄带1 GHz频率的电磁波。估计单向多普勒频移。
频率= 1 e9;v = 23.0;λ= physconst (“光速”)/频率;dopplershift = speed2dop (v,λ)
dopplershift = 76.7197
单向多普勒频移是大约76.72赫兹。因为目标方法接收机、多普勒频移是正的。
多普勒频移转换为速度
假设您观察一个多普勒频移的400.0赫兹9 GHz频率的波形。确定目标的径向速度。
频率= 9 e9;df = 400.0;λ= physconst (“光速”)/频率;速度= dop2speed (df,λ)
速度= 13.3241
目标速度大约是13.32 m / s。
脉冲多普勒处理的标准时间数据
一个共同的技术估计一个移动的目标的径向速度脉冲多普勒处理。在脉冲多普勒处理,取离散傅里叶变换(DFT)从一个范围本标准时间的数据包含一个目标。如果脉冲重复频率足够高的速度的目标,目标位于相同的范围本的脉冲。因此,标准时间范围的数据对应于本包含的信息移动目标的多普勒频移引起的,你可以使用它来估计目标的径向速度。
的标准时间数据采样脉冲重复频率的DFT(脉冲),因此数据对于一个给定的范围本标准时间收益率估计的多普勒谱(脉冲重复频率/ 2,脉冲重复频率/ 2)赫兹。因为标准时间数据是复数,DFT大小不一定是偶函数的多普勒频率。这消除了歧义之间的多普勒频移对应于即将来临的(积极的多普勒频移),或消退(负多普勒频移)的目标。解决在多普勒域编码脉冲/ N, N是标准时间样本的数量。你可以垫的谱估计与0插入DFT频率标准时间数据网格,提高峰值检测,但这并不能提高多普勒分辨率。
典型的工作流在脉冲多普勒处理包括:
检测范围的目标维度(夏令时间样本)。这给了范围本标准时间维度的分析。
的DFT计算对应于指定的范围本标准时间样本。识别显著峰值幅度谱和相应的多普勒频率转换为速度。
使用脉冲多普勒处理范围和速度
这个例子说明了脉冲多普勒处理使用相控阵系统工具箱™。假设您有一个固定单站雷达位于全球的起源,(0,0,0)。雷达由一个各向同性天线元素。有目标nonfluctuating雷达截面(RCS)的最初位于1平方米(1000、1000、0)m和在一个恒定的速度移动(-100、-100、0)m / s。天线的运作1 GHz的频率和照亮目标10矩形脉冲的脉冲重复频率10 kHz。
本例定义所需的系统对象并设置其属性。的随机数生成器的种子phased.ReceiverPreamp系统对象™产生可重复的结果。
波形= phased.RectangularWaveform (“SampleRate”5 e6,…“脉冲宽度”,6 e -,“OutputFormat”,“脉冲”,…“NumPulses”,1脉冲重复频率的1 e4);目标= phased.RadarTarget (“模型”,“Nonfluctuating”,…“MeanRCS”,1“OperatingFrequency”1 e9);targetpos = phased.Platform (“InitialPosition”,1000;1000;0),…“速度”,-100;-100;0]);天线= phased.IsotropicAntennaElement (…“FrequencyRange”[5 e8 5 e9]);发射机= phased.Transmitter (“PeakPower”5 e3,“获得”,20岁,…“InUseOutputPort”,真正的);transpos = phased.Platform (“InitialPosition”(0,0,0),…“速度”,(0,0,0));散热器= phased.Radiator (“OperatingFrequency”1 e9“传感器”,天线);收集器= phased.Collector (“OperatingFrequency”1 e9“传感器”,天线);频道= phased.FreeSpace (“SampleRate”waveform.SampleRate,…“OperatingFrequency”1 e9“TwoWayPropagation”、假);接收机= phased.ReceiverPreamp (“获得”0,“LossFactor”0,…“SampleRate”5 e6,“NoiseFigure”5,…“EnableInputPort”,真的,“SeedSource”,“属性”,“种子”1 e3);
这个循环传输连续十个矩形脉冲向目标,反映了脉冲目标,收集反映脉冲接收器,并更新目标位置与指定的恒定速度。
NumPulses = 10;sig =波形();%得到波形transpos = transpos.InitialPosition;%得到发射机的位置rxsig = 0(长度(团体),NumPulses);% 10脉冲传输和接收为n = 1: NumPulses%更新目标位置[tgtpos, tgtvel] = targetpos (1 / waveform.PRF);[tgtrng, tgtang] = rangeangle (tgtpos transpos);房产申诉专员署(n) = tgtrng;[txsig, txstatus] =发射机(团体);%传输波形txsig =散热器(txsig tgtang);%对目标辐射波形txsig =通道(txsig transpos tgtpos, (0, 0, 0), tgtvel);%波形传播到目标txsig =目标(txsig);%反映信号%传播波形从目标传输txsig =通道(txsig tgtpos、transpos tgtvel, (0, 0, 0));txsig =收集器(txsig tgtang);%收集信号rxsig (:, n) =接收机(txsig ~ txstatus);%接收信号结束
矩阵rxsig包含回波数据在500 - 10矩阵行维度包含夏令时间样本和列维度包含标准时间样本。换句话说,矩阵中的每一行包含一个特定的范围本标准时间样本。
构造一个linearly-spaced网格对应范围垃圾箱的夏令时间样本。箱子从0米扩展到最大范围明确的范围。
脉冲重复频率= waveform.PRF;fs = waveform.SampleRate;fasttime = unigrid (0,1 / fs, 1 /脉冲重复频率,“()”);rangebins = (physconst (“光速”)* fasttime) / 2;
接下来,检测箱含有目标范围。在这个简单的场景中,没有利用匹配滤波或时变增益补偿。
在这个例子中,设置的虚警概率 。使用非相干积分的十个矩形脉冲,并确定相应的阈值检测在高斯白噪声。因为这个场景中只包含一个目标,以最大峰值高于阈值。显示估计的目标区间。
probfa = 1 e-9;NoiseBandwidth = 5 e6/2;npower = noisepow (NoiseBandwidth…receiver.NoiseFigure receiver.ReferenceTemperature);打= npwgnthresh (probfa NumPulses,“非相干”);打=√- * db2pow(打));[pks, range_detect] = findpeaks (pulsint (rxsig,“非相干”),…“MinPeakHeight”打,“SortStr”,“下”);range_estimate = rangebins (range_detect (1));
提取相对应的标准时间样本包含检测的范围本的目标。计算功率谱密度估计的标准时间样品使用周期图功能和找到峰值频率。多普勒频率峰值转换为速度使用dop2speed函数。积极的多普勒频移表示目标是接近发射机。消极的多普勒频移表示目标是远离发射机。
ts = rxsig (range_detect (1):)。”;[Pxx F] =周期图(ts,[], 256年,脉冲重复频率,“中心”);情节(F, 10 * log10 (Pxx))网格包含(的频率(赫兹))ylabel (“权力(dB)”)标题(周期图频谱估计的)
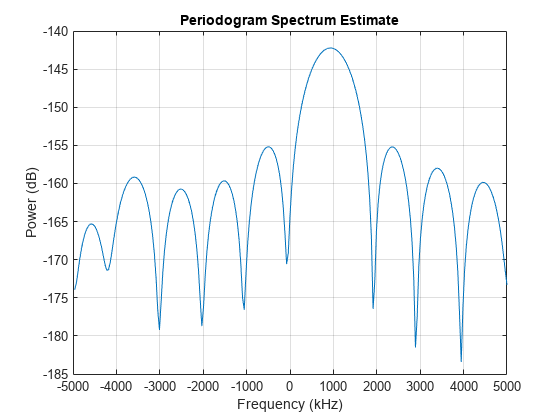
[Y,我]= max (Pxx);λ= physconst (“光速”)/ 1 e9;tgtspeed = dop2speed (F(我)/ 2,λ);流(的估计范围的目标是f % 4.2米。\ n”,…range_estimate)
估计范围的目标是1439.00米。
流(的估计目标速度是f % 3.1米/秒。\ n”tgtspeed)
估计目标速度是140.5米/秒。
如果F(我)> 0流(的目标是接近雷达。\ n”)其他的流(的目标是远离雷达。\ n”)结束
目标是接近雷达。
检测到目标的径向速度的范围内多普勒分辨率和目标检测雷达的距离分辨率。