测量强度等级使用强度范围
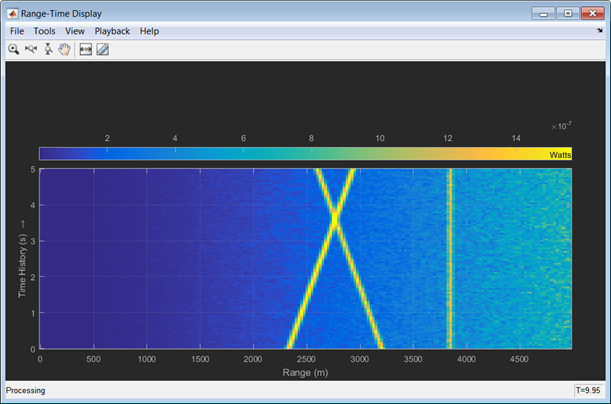
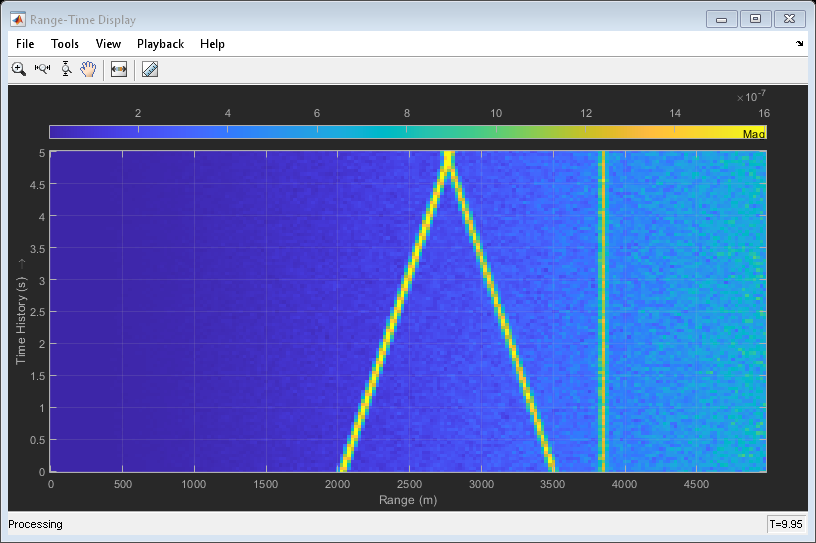
本教程介绍了如何衡量的使用强度范围的UI信号强度。首先,创建强度范围。你可以用下面的例子开始,RTI和DTI完整显示雷达仿真或者你可以创建自己的范围。当本实施例中发射,范围 - 时间 - 强度(RTI)和多普勒时间 - 强度(DTI)的显示窗口中打开。本教程重点介绍的RTI显示屏上,这样就可以关闭窗口DTI一旦处理循环完成。该图示出了处理完成后的RTI显示。显示示出了三个轨道。
检查数据,点击光标测量按钮![]() 在工具栏。您可以看到两个游标,每个游标都由成对的十字光标表示。为了区分游标,一对由实线组成,另一对由虚线组成,并用a标记1或2.
在工具栏。您可以看到两个游标,每个游标都由成对的十字光标表示。为了区分游标,一对由实线组成,另一对由虚线组成,并用a标记1或2.
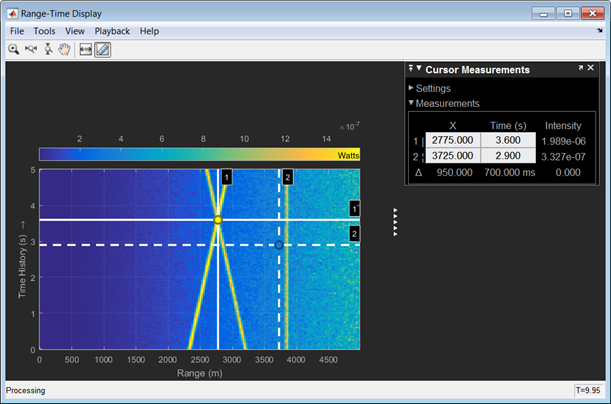
游标1有固定的十字线,并覆盖两条信号线的交点。光标2已将十字准线虚线化,并覆盖了一个无信号区域。的光标测量窗格显示游标在时间和范围内的坐标(已标记X以及这些位置的强度。光标1距离为2775米,时间为3.6秒。此时的信号强度为1.989e-6瓦。光标2距离为3725米,时间为2.9秒。此时的信号强度为3.327e-7瓦。您可以将游标移动到任何感兴趣的位置并获得强度值。
RTI和DTI完整显示雷达仿真
使用phased.IntensityScope系统对象?以显示一个完整的雷达系统仿真的检测输出。雷达方案包含一个固定的单元素单基地雷达和三个移动目标。
注意:这个例子只能运行在R2016b或更高版本。如果您使用的是早期版本,替换每个调用该函数与等价步语法。例如,替换myObject (x)与步骤(myObject的,x)的.
设置雷达操作参数
设置探测概率、虚警概率、最大距离、距离分辨率、工作频率、发射机增益、目标雷达截面。
PD = 0.9;PFA = 1E-6;MAX_RANGE = 5000;range_res = 50;FC = 10E9;tx_gain = 20;tgt_rcs = 1;
选择信号传播速度为光速,计算与工作频率相对应的信号波长。
c = physconst (“光速”);拉姆达= C / FC;
从距离分辨率计算脉冲带宽。设定采样率,fs,两倍的脉冲带宽。噪声带宽也被设定为脉冲带宽。该雷达集成了多个由设置的脉冲num_pulse_int.每个脉冲的持续时间是脉冲带宽的倒数。
pulse_bw = C /(2 * range_res);pulse_length = 1 / pulse_bw;FS = 2 * pulse_bw;noise_bw = pulse_bw;num_pulse_int = 10;
设置脉冲重复频率以匹配雷达的最大范围。
脉冲重复频率= c / (2 * max_range);
计算传输能量
使用Albersheim方程来计算满足期望的检测概率和误报概率所需的信噪比。然后,使用雷达方程来计算所需的功率,以达到所需的信噪比。
snr_min = albersheim(PD,PFA,num_pulse_int);peak_power = radareqpow(拉姆达,MAX_RANGE,snr_min,pulse_length,...RCS的tgt_rcs,“获得”,tx_gain);
为模型创建系统对象
选择一个矩形波形。
波形= phased.RectangularWaveform (“脉冲宽度”pulse_length,...脉冲重复频率的脉冲重复频率,“SampleRate”fs);
将接收器的放大器特性。
放大器= phased.ReceiverPreamp(“获得”,20岁,“NoiseFigure”,0,...“SampleRate”,FS,'EnableInputPort',真的,'SeedSource','属性',...“种子”,2007);发射机= phased.Transmitter(“获得”tx_gain,'峰值功率'peak_power,...“InUseOutputPort”,真正的);
指定雷达天线作为一个单一的全向天线。
天线= phased.IsotropicAntennaElement('频率范围'[5 e9 15 e9]);
建立单站雷达平台。
radarplatform = phased.Platform ('初始位置',[0;0;0],...“速度”,[0;0;0]);
使用单个系统对象设置三个目标平台。
targetplatforms = phased.Platform (...'初始位置'[2000.66 3532.63 3845.04;0 0 0;0 0 0],...“速度”,(150 -150 0;0 0 0;0 0 0]);
创建散热器和收集器系统对象。
散热器= phased.Radiator('传感器'、天线、'工作频率'、fc);集电极= phased.Collector('传感器'、天线、'工作频率'、fc);
下设3个目标RCS特性。
目标= phased.RadarTarget ('MeanRCS'[1.6 2.2 1.05],'工作频率'、fc);
创建系统对象模型的双向自由空间传播。
渠道= phased.FreeSpace (“SampleRate”,FS,'TwoWayPropagation',真的,...'工作频率'、fc);
定义匹配滤波器。
MFcoef = getMatchedFilter(波形);过滤器= phased.MatchedFilter (“系数”,MFcoef,“GainOutputPort”,真正的);
创建距离和多普勒垃圾箱
建立快速时间网格。快速时间是呼应脉冲相对于所述脉冲的传输时间的采样时间。所述范围段是对应于快速时间网格的每个区间的范围内。
fast_time = unigrid(0,1 / FS,1 / PRF,'[)');range_bins = C * fast_time / 2;
为了补偿距离损失,创建一个时变增益系统对象?
增益= phased.TimeVaryingGain('RangeLoss',2 * fspl(range_bins,拉姆达),...“ReferenceLoss”,2 * fspl(MAX_RANGE,拉姆达));
设置多普勒单元。多普勒单元由脉冲重复频率确定。创建多普勒处理的FFT系统对象。
DopplerFFTbins = 32;DopplerRes = PRF / DopplerFFTbins;FFT = dsp.FFT('FFTLengthSource','属性',...'FFTLength',DopplerFFTbins);
创建数据立方体
建立简化的数据多维数据集。通常,一个数据立方体具有快时间和慢时间维度以及传感器的数量。因为数据立方体只有一个传感器,所以它是二维的。
rx_pulses =零(numel(fast_time),num_pulse_int);
创建IntensityScope系统对象
创建两个IntensityScope系统对象,一个用于多普勒时间强度,另一个用于距离时间强度。
dtiscope = phased.IntensityScope(“名字”,“多普勒时间显示”,...'XLabel',“速度(米/秒)”,...“XResolution”,dop2speed(DopplerRes,C / FC)/ 2,...“X偏移”dop2speed(脉冲重复频率/ 2,c / fc) / 2,...'TimeResolution',0.05,“时间间隔”5,'IntensityUnits',“弹匣”);rtiscope = phased.IntensityScope(“名字”,“范围,时间显示”,...'XLabel',的范围(m),...“XResolution”和c /(2个* FS),...'TimeResolution',0.05,“时间间隔”5,'IntensityUnits',“弹匣”);
在多个雷达传输上运行仿真回路
发送2000个脉冲。在时间相干处理10个脉冲的基团。
对于每一个脉冲:
更新雷达位置和速度
radarplatform更新目标位置和速度
targetplatforms创建要传输的单个波列的脉冲
发射机计算范围和目标的角度相对于所述雷达
把信号辐射到目标
散热器将脉冲传播到目标并返回
渠道反射离开目标的信号
目标接收的信号
sCollector放大接收到的信号
放大器表单数据立方体
对于数据立方体中的每组10个脉冲:
匹配筛选数据多维数据集的每一行(快速时间维度)。
计算数据立方体的每一行(慢时间维度)的多普勒位移。
PRI = 1 / PRF;n步= 200;为k = 1: nsteps为m = 1时:num_pulse_int [ant_pos,ant_vel] = radarplatform(PRI);[tgt_pos,tgt_vel] = targetplatforms(PRI);SIG =波形();[S,tx_status] =发射机(SIG);[〜,tgt_ang] = rangeangle(tgt_pos,ant_pos);TSIG =散热器(S,tgt_ang);TSIG =通道(TSIG,ant_pos,tgt_pos,ant_vel,tgt_vel);RSIG =目标(TSIG);RSIG =收集器(RSIG,tgt_ang);rx_pulses(:,M)=放大器(RSIG,〜(tx_status> 0));结束rx_pulses =滤波器(rx_pulses);MFdelay =尺寸(MFcoef,1) - 1;rx_pulses =缓冲液(rx_pulses((MFdelay + 1):结束),尺寸(rx_pulses,1));rx_pulses =增益(rx_pulses);范围= pulsint(rx_pulses,“非相干”);rtiscope(范围);dshift = FFT(rx_pulses');dshift = fftshift(ABS(dshift),1);dtiscope(平均值(dshift,2));radarplatform(0.05);targetplatforms(0.05);结束
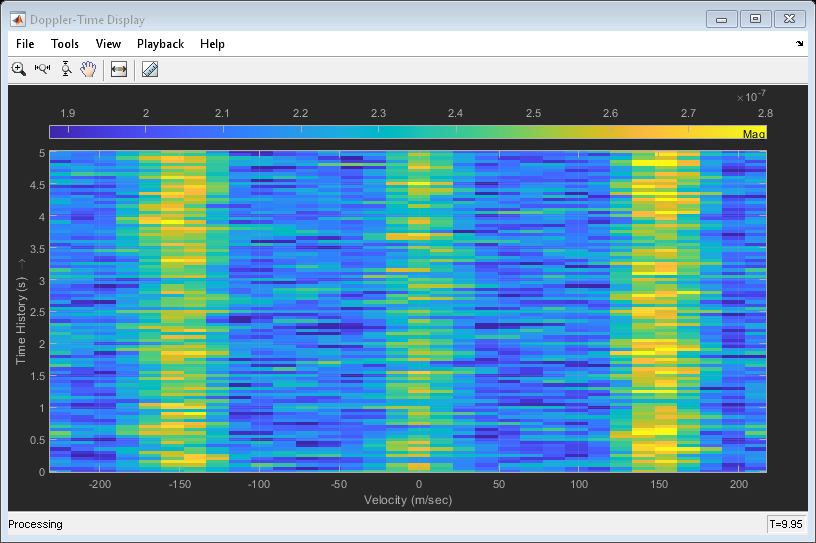
所有的目标都在x轴上。两个目标在x轴上运动,一个是静止的。因为雷达在原点,你可以直接从多普勒时间显示窗口读取目标速度。这些值与规定的速度一致,分别为-150、150和0米/秒。