使用MFSK波形同时估计距离和速度
这个例子比较了用于同时估计多个目标的距离和速度的三角扫描调频连续(FMCW)和多重频移键控(MFSK)波形。MFSK波形是专门为先进驾驶辅助系统(ADAS)中使用的汽车雷达系统设计的。它在多目标场景中特别有吸引力,因为它不引入幽灵目标。
三角扫描FMCW波形
在基于FMCW技术的汽车自适应巡航控制(雷达工具箱)设计了一个汽车雷达系统为自动巡航控制系统执行距离估计。在该示例的后一部分,三角形扫描FMCW波形被用来同时估计目标车辆的距离和速度。
虽然三角扫描FMCW波形很好地解决了单个目标的距离-多普勒耦合问题,但在多目标情况下,其处理变得复杂。下一节展示了当两个目标存在时三角形扫描FMCW波形的行为。
场景包括一辆距离雷达50米的汽车,以96公里/小时的速度沿雷达方向行驶,以及一辆距离雷达55米的卡车,以70公里/小时的速度沿雷达方向行驶。雷达本身的飞行速度为每小时60公里。
rng (2015);[fmcwwaveform、目标,tgtmotion,通道,发射机,接收机,...sensormotion,c,fc,lambda,fs,maxbeatfreq] = helperMFSKSystemSetup;
接下来,模拟两辆车的雷达回波。FMCW波形的扫描带宽为150mhz,因此距离分辨率为1米。每次向上或向下扫描需要1毫秒,所以每个三角形扫描需要2毫秒。注意,执行联合范围和速度估计只需要一个三角形扫描。
Nsweep = 2;xr = helperFMCWSimulate(Nsweep,fmcwwaveform,sensormotion,tgtmotion,...发射机、通道、目标、接收机);
虽然系统需要150兆赫的带宽,但最大拍频要小得多。这意味着在处理端,可以将信号减少到较低的频率,以减轻硬件要求。然后使用抽取信号估计节拍频率。
Dfactor = ceil(fs/maxbeatfreq)/2;Fs_d = fs/dfactor;Fbu_rng = rootmusic(decimate(xr(:,1),dfactor),2,fs_d);Fbd_rng = rootmusic(decimate(xr(:,2),dfactor),2,fs_d);
现在有两个上扫的拍频和两个下扫的拍频。由于任何一对来自上扫和下扫的拍频都可以定义目标,因此有四种可能的距离和多普勒估计组合,但只有两种与真正的目标相关。
sweep_slope = fmcwwaveform.SweepBandwidth/fmcwwaveform.SweepTime;Rng_est = beat2range([fbu_rng fbd_rng;fbu_rng flipud(fbd_rng)],...sweep_slope, c)
rng_est =4×149.9802 54.9406 64.2998 40.6210
剩下的两个通常被称为幽灵目标。用时频表示法可以更好地解释真实目标和虚目标之间的关系。
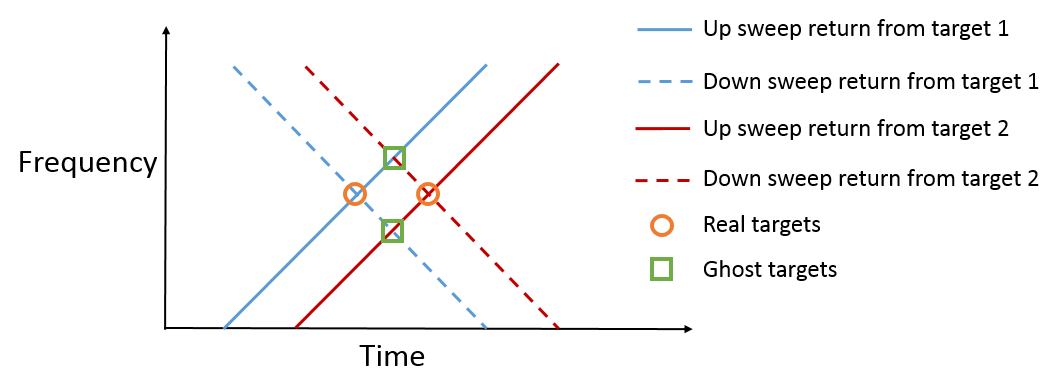
如图所示,每一个向上扫描返回和向下扫描返回的交集表示一个可能的目标。因此,区分真实目标和幽灵目标是至关重要的。为了解决这种不确定性,可以发送附加的具有不同扫描斜率的FMCW信号。由于只有真实目标在时频域占据相同的交点,因此模糊问题得到了解决。然而,这种方法显著增加了处理的复杂性,以及获得有效估计所需的处理时间。
MFSK波形
多频移键控(MFSK)波形[1]为汽车雷达在多目标情况下实现同步距离和多普勒估计而不落入鬼目标陷阱而设计。它的时频表示如下图所示。
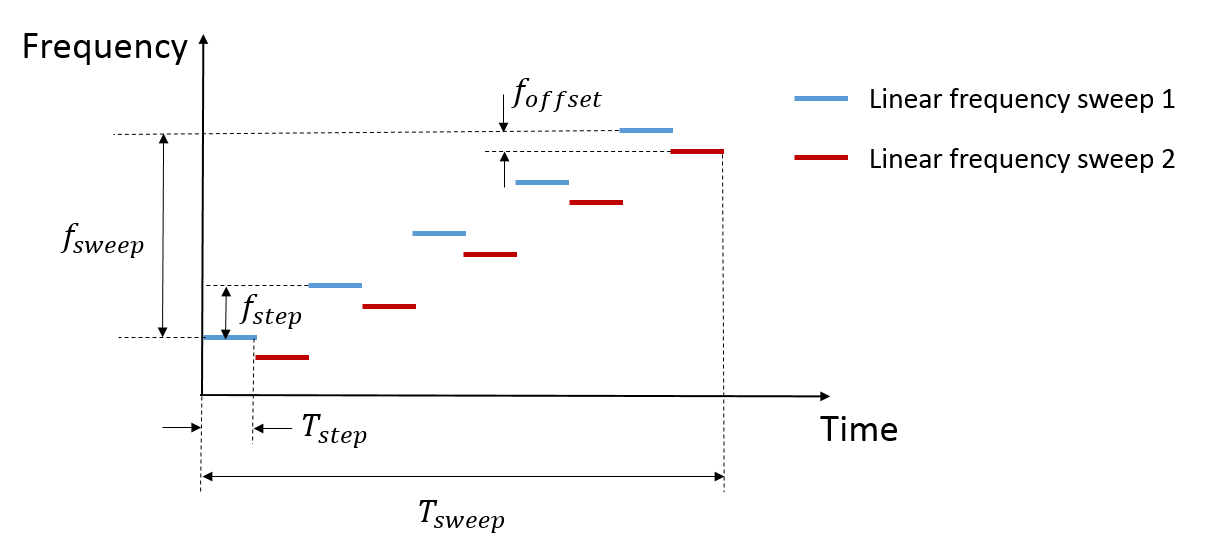
图中显示MFSK波形是两个具有固定频率偏移的线性FMCW波形的组合。与常规的FMCW波形不同,MFSK以离散的步长扫描整个带宽。在每一步中,传输一个单频连续波信号。因为在每个步骤中有两个音调,它可以被认为是一个频移键控(FSK)波形。因此,FMCW波形有一组距离和多普勒关系,FSK波形有另一组距离和多普勒关系。将两组关系组合在一起有助于解决距离和多普勒之间的耦合,而不管场景中出现的目标数量。
下面的部分模拟前面的例子,但是使用MFSK波形代替。
基于MFSK波形的端到端雷达系统仿真
首先,对MFSK波形进行参数化,以满足文中规定的系统要求[1].因为距离分辨率是1米,所以扫描带宽设置为150mhz。此外,频率偏移设置为-294 kHz,如[1].每个步骤大约持续2微秒,整个扫描有1024个步骤。因此,每次FMCW扫描需要512步,总扫描时间略多于2毫秒。注意,扫描时间与前几节中使用的FMCW信号相比较。
mfsk波形=相控。MFSKWaveform (...“SampleRate”151 e6,...“SweepBandwidth”150 e6,...“StepTime”2 e-6...“StepsPerSweep”, 1024,...“FrequencyOffset”-294年e3,...“OutputFormat”,“清洁工”,...“NumSweeps”1);
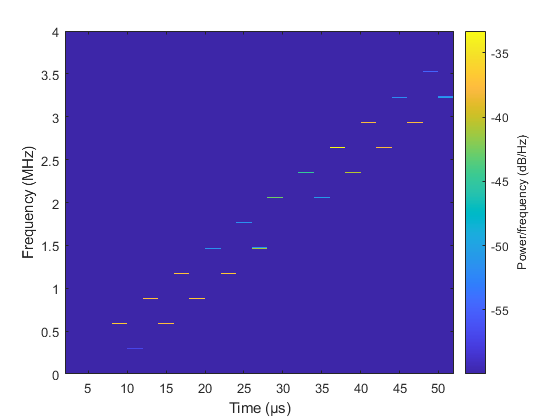
下图显示了波形的频谱图。它被放大到一个小的区间,以更好地揭示波形的时频特性。
numsamp_step = round(mfskform . samplerate * mfskform . steptime);Sig_display = mfsk波形();光谱图(sig_display (1:8192), kaiser (3 * numsamp_step, 100),...装天花板(2 * numsamp_step), linspace (0, 4 e6, 2048), mfskwaveform。SampleRate,...“桠溪”,“重新分配”,“minthreshold”, -60)
接下来,模拟系统的返回。同样,只需要一次扫描来估计距离和多普勒。
Nsweep = 1;释放(渠道);通道。SampleRate = mfskform .SampleRate;释放(接收器);接收器。SampleRate = mfskform .SampleRate;xr = helperfmcwsimulation (Nsweep, mfsk波形,sensormotion,tgtmotion,...发射机、通道、目标、接收机);
后续处理在每一步结束时对返回回波采样,并将采样信号分组为对应于两次扫描的两个序列。注意,结果序列的采样频率现在与每一步的时间成正比,这与原始采样速率相比要小得多。
X_dechirp =重塑(xr(numsamp_step:numsamp_step:end),2,[]).';fs_dechirp = 1/(2* mfskform . steptime);
在FMCW信号的情况下,MFSK波形在频域处理。下图显示了接收到的两次扫频对应的回波频谱。
Xf_dechirp = fft(x_dechirp);Num_xf_samp = size(xf_dechirp,1);'/num_xf_samp*fs_dechirp;CLF subplot(211),plot(beatfreq_vec/1e3,abs(xf_dechirp(:,1)))网格在ylabel (“级”)标题(“扫描1的频谱”subplot(212),plot(beatfreq_vec/1e3,abs(xf_dechirp(:,2)))网格在ylabel (“级”)标题(“扫描2的频谱”)包含(的频率(赫兹))
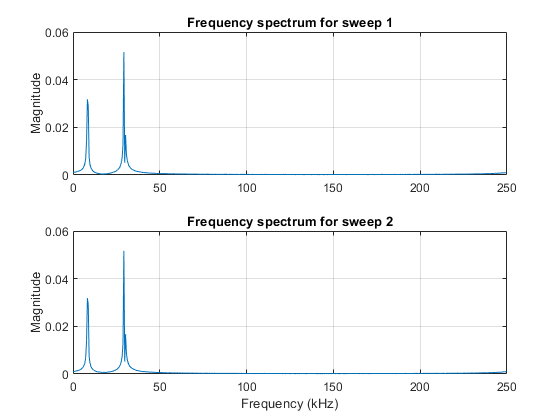
注意,在每个频谱中有两个峰值表示两个目标。此外,在两次回归中,峰值都在相同的位置,所以没有幽灵目标。
要检测峰值,可以使用CFAR探测器。一旦检测到,拍频和两个光谱之间的相位差在峰值位置计算。
Cfar =阶段性。CFARDetector (“ProbabilityFalseAlarm”1飞行,...“NumTrainingCells”8);Peakidx = cfar(abs(xf_dechirp(:,1)),1:num_xf_samp);Fbeat = beatfreq_vec(peakidx);Phi = angle(xf_dechirp(peakidx,2))-angle(xf_dechirp(peakidx,1));
最后,利用拍频和相位差来估计距离和速度。根据你如何构造相位差,方程略有不同。对于本例中所示的方法,可以证明范围和速度满足以下关系:
在哪里 是拍频, 是相位差, 是波长, 是传播速度, 是步长, 是频率偏移量, 是扫斜率, 是范围,和 是速度。根据方程,可估计射程和速度如下:
Sweep_slope = mfsk波形。SweepBandwidth /...(mfskwaveform.StepsPerSweep * mfskwaveform.StepTime);temp =...[2 /λ2 * sweep_slope / c; 2 /λ* mfskwaveform。StepTime 2 * mfskwaveform。FrequencyOffset \ / c)...[Fbeatφ/(2 *π)]。”;R_est = temp(2,:)
r_est =1×254.8564 - 49.6452
V_est = temp(1,:)
v_est =1×236.0089 - -9.8495
估计的范围和速度与真实的范围和速度值匹配得非常好。
汽车:r = 50米,v = -10米/秒
卡车:r = 55米,v = 36米/秒
总结
这个例子展示了两种同步的距离和速度估计方法,使用三角形扫描FMCW波形或MFSK波形。这个例子表明,当存在多个目标时,MFSK波形比FMCW波形有优势,因为它在处理过程中不会引入虚目标。
参考文献
[1]罗林,H.和M.迈内克。汽车雷达系统波形设计原理,国际雷达会议论文集,2001。
您也可以从以下列表中选择网站: