主要内容
装载不平衡的机器人
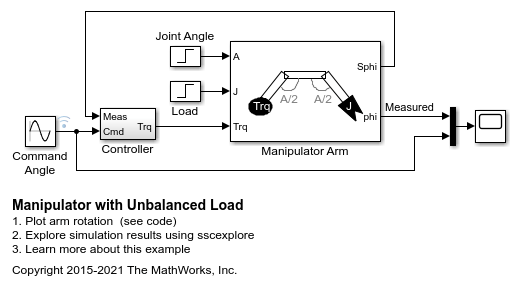
该模型显示了一种机械手,其通过不平衡臂控制末端执行器的方向。电动机用简单的比例控制表示为扭矩源。当末端执行器固定负载时,末端执行器上的负载急剧增加。在每个传感器上引入噪音以测量其对控制器性能的影响。
模型
机械手臂子系统
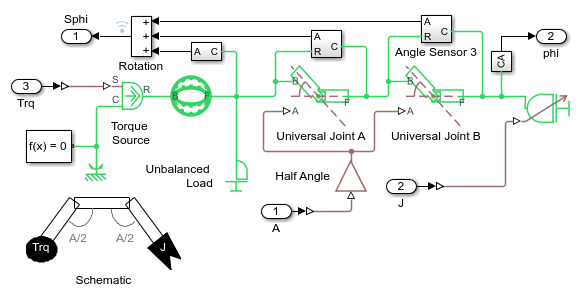
操纵器臂由谐波驱动器组成,两个通用接头组装在一起以形成双载体关节,以及负载。理想的扭矩源旋转臂。控制器需要处理双载体关节中的不同角度,对惯性载荷(可变惯量)的变化,以及其惯性随旋转角度(不平衡负载)而变化的轴。
传感器的控制信号是三个传感器的总和,每个总和测量臂的一部分的旋转角度。
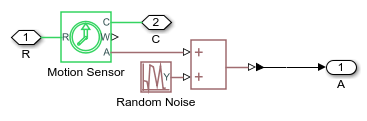
角度传感器3子系统
随机噪声将随机噪声添加到为控制器提供信号的三个传感器中的每一个。
Simscape Logging的仿真结果
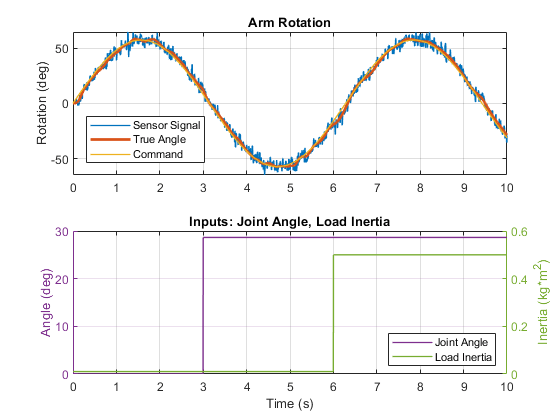
下面的曲线显示了在命令信号之后的旋转臂的位置。该系统暴露于两个步骤障碍:对双载体接头中的角度和臂末端的惯性负载变化。控制器的额外挑战包括具有惯性的轴,其随着角度和添加到每个传感器信号的噪声而变化。
您还可以从以下列表中选择一个网站: