主要内容
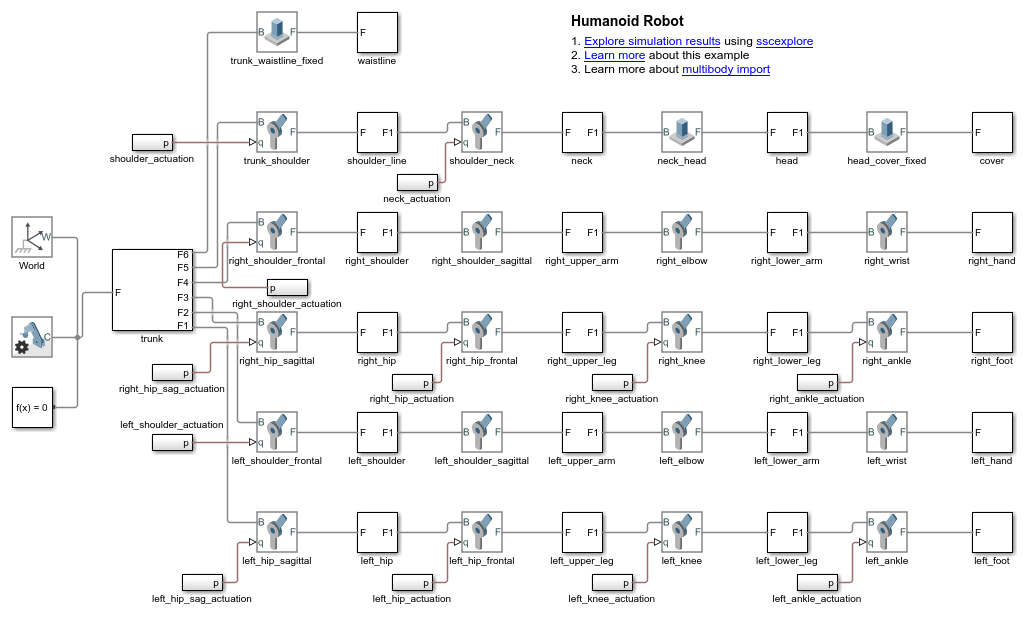
人形机器人
此示例已使用smimport命令从URDF文件导入。URDF文件“sm_humanoid.urdf”和可视化机器人部件的步骤文件用于创建此示例。手动将关节的运动致动在导入的模型中添加到导入的模型中,使机器人能够执行有趣的运动。
您还可以从以下列表中选择一个网站:
此示例已使用smimport命令从URDF文件导入。URDF文件“sm_humanoid.urdf”和可视化机器人部件的步骤文件用于创建此示例。手动将关节的运动致动在导入的模型中添加到导入的模型中,使机器人能够执行有趣的运动。
您还可以从以下列表中选择一个网站: