主要内容
导入机器人ARM CAD模型
示例概述
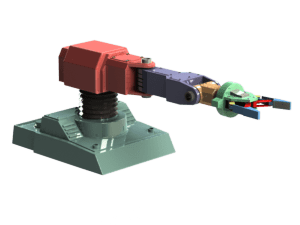
此示例显示如何生成一个Simscape™MultiBody™来自多个人的模型描述XML文件使用小运动功能。该示例基于名为SM_ROBOT的多体描述文件和包含在您的一组部分几何文件simscape multibody.安装。这些文件描述了图中所示的机器人臂模型。
示例文件
在此示例中使用的多体描述和部分几何文件位于文件夹中
matlabroot.\ toolbox \ physmod \ sm \ smdemos \ import \ Robot
C:程序\ matlab \
导入模型
在MATLAB命令提示符下,输入命令:
smimport('sm_robot');
小运动功能设置。
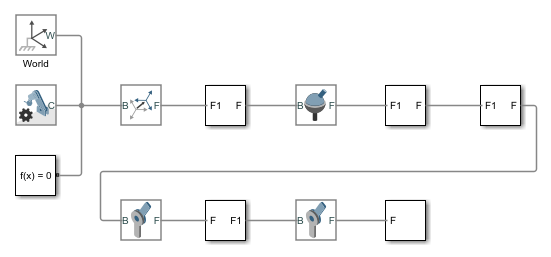
生成模型中的块以MATLAB变量参数化。这些变量的数值在命名为sm_robot.m的数据文件中定义,并将其存储在与生成的模型相同的活动文件夹中。
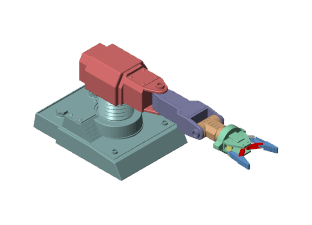
可视化模型
更新图以可视化模型。在里面造型选项卡,单击更新模型。Mechanics Explorer在其初始配置中打开了机器人臂模型的静态可视化。

Mechanics Explorer中的默认视图约定与用于创建原始装配模型的CAD应用程序中的不同之处不同。Mechanics Explorer使用Z-Axis-Up View Atormation,而CAD应用程序使用Y轴上查看约定。
通过设置“将”从机械探险器“工具器工具机制”进行“查看公约”查看公约参数到y up(xy front)。然后,从中选择标准视图看法>标准观点菜单应用新视图约定。
建模
尝试模拟模型。因为机器人手臂缺乏控制系统,所以它只是在重力下连枷。您可以使用simulin万博1manbetxk®块创建指导机器人臂运动所需的控制系统。控制系统将运动感测输出转换为各个接头处的致动输入。您可以从联合块对话框中公开传感和驱动端口。
也可以看看
相关话题
您还可以从以下列表中选择一个网站: