BLDC电流控制器产生PWM波形
使用脉冲宽度调制产生的离散时间无刷直流电动机电流PI控制器
- 图书馆:
的Simscape /电气/控制/ BLDC控制
描述
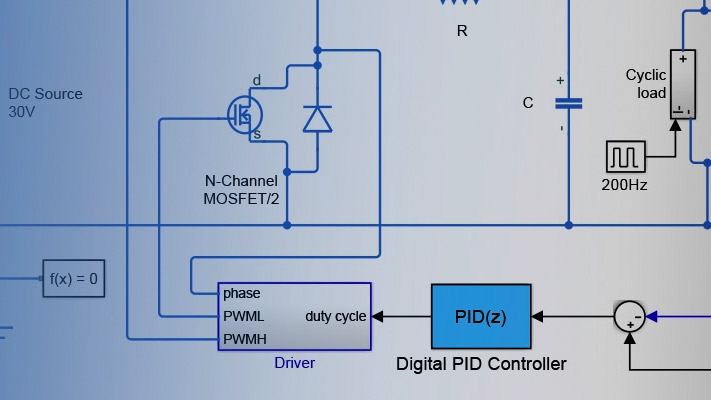
该<小号pan class="block">BLDC电流控制器产生PWM波形块产生一个脉冲宽度调制(PWM)信号和控制在无刷DC电动机电流。该控制器使用该算法。
方程
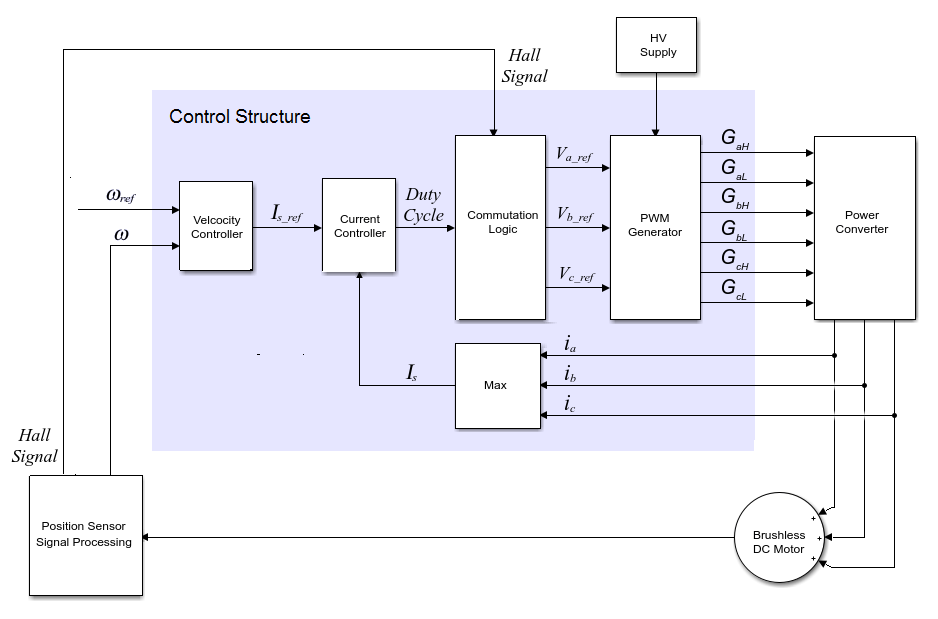
该<小号pan class="block">BLDC电流控制器产生PWM波形产生占空比为BLDC通过使用该方程执行比例 - 积分(PI)电流控制框
哪里:
d为占空比。
ķ<小号ub>p是比例增益。
ķ<小号ub>一世是积分增益。
Ť<小号ub>小号为时间周期。
一世<小号ub>s_ref是参考电流。
一世<小号ub>小号是所测量的电流。
G<小号ub>ZC是零取消多项式。
用于PI控制算法的闭环传递函数产生能够由在所述前馈路径中使用零消除块被取消为零。在离散时间零消除传递函数为:
该块由换流信号的占空比乘以获得用于三个相位的控制信号。将得到的三个控制信号被归一化在区间[-1,1]。
PWM发生器输出一个1,当控制信号的值比载波计数器值。否则,PWM发生器输出一个0。
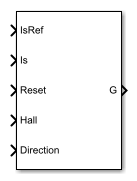
端口
输入
产量
参数
参考
[1] Stirban,A.,I. Boldea,和G. D. Andreescu。“BLDC-PM电机脱机的运动,传感器控制FEM-信息辅助位置和速度观测。”<Ë米class="citetitle">IEEE交易于行业应用。48,没有。6(2012):1950至1958年。
扩展功能
也可以看看
块
- BLDC换相逻辑|<小号pan itemscope itemtype="//www.tianjin-qmedu.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">BLDC电流控制器
的Simscape块
介绍了在R2018a
选择网站
选择一个网站,以获得翻译的内容,其中可看到当地的活动和优惠。根据您的位置,我们建议您选择:<小号trong class="recommended-country">。
选择<小号pan class="recommended-country">网站您还可以选择从下面的列表中的网站: