刷电流控制器
离散时间无刷直流电机电流PI控制器
- 库:
Simscape /电气/控制/无刷直流控制
描述
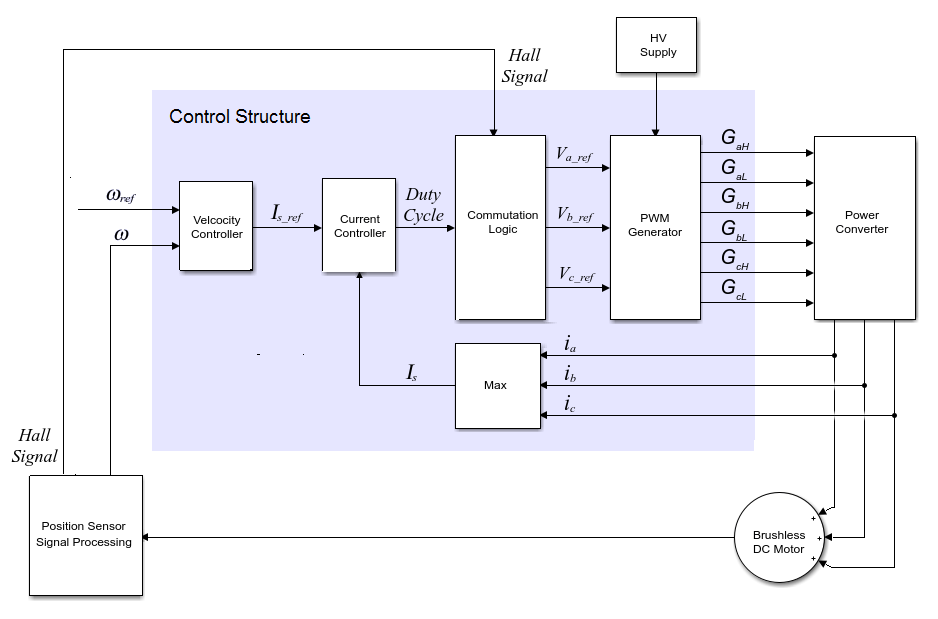
的刷电流控制器block采用该算法对直流无刷电机进行电流控制。
方程
的刷电流控制器产生占空比为刷通过使用此方程实现比例积分(PI)电流控制来阻塞。
地点:
D为占空比。
Kp是比例增益。
K我为积分增益。
T年代为时间周期。
我s_ref为参考电流。
我年代为测量电流。
G佐是零取消多项式。
用于PI控制算法的闭环传递函数产生能够由在所述前馈路径中使用的零消除被取消为零。在离散时间零消除传递函数为:
该块通过将占空比乘以换相信号获得三相的控制信号。由此产生的三个控制信号在区间内归一化[- 1,1]。
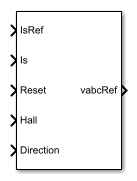
港口
输入
输出
参数
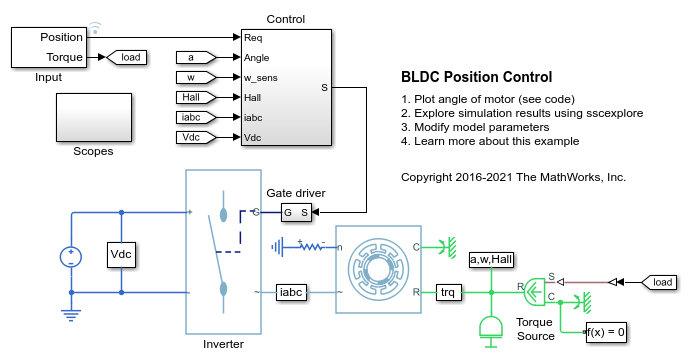
模型的例子
参考
[1] Stirban, A., I. Boldea,和G. D. Andreescu。无动作传感器控制的无刷直流电动机与离线femi信息辅助位置和速度观察者。IEEE工业应用汇刊。48岁的没有。6(2012): 1950 - 1958。
扩展功能
介绍了R2018a
您也可以从以下列表中选择一个网站: