主要内容
离散PI控制器
具有外部防风输入的离散时间PI控制器
- 图书馆:
Simscape /电气/控制/一般控制

描述
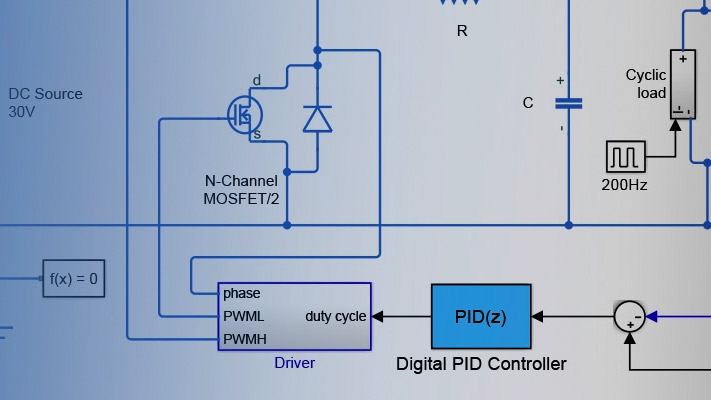
这离散PI控制器阻止使用外部防绕组输入实现离散PI控制。
该图是具有外部防风输入的控制器的等效电路。

方程式
这离散PI控制器块使用向后欧拉离散化方法计算控制信号:
在哪里
你是控制信号。
K.P.是比例增益系数。
K.一世是积分增益系数。
K.aw是抗卷积增益系数。
T.S.是抽样期。
E.是错误信号。
为防止过冲过冲,块可以使用后面计算来实现外部防风机制。它输入du(k),饱和控制信号之间的差异,你星期六(k)和计算的不饱和控制信号,英国)。然后,它通过抗卷绕系数倍增,并从积分增益增加放大的信号。
港口
输入
输出
参数
参考
[1]Åström,K.和T.Hägglund。高级PID控制。研究三角公园,NC:ISA,2005。
扩展能力
在R2017B中介绍
您还可以从以下列表中选择一个网站: