主要内容
具有整体防卷的离散PI控制器
具有整体抗风的离散时间PI控制
- 图书馆:
Simscape /电气/控制/一般控制
描述
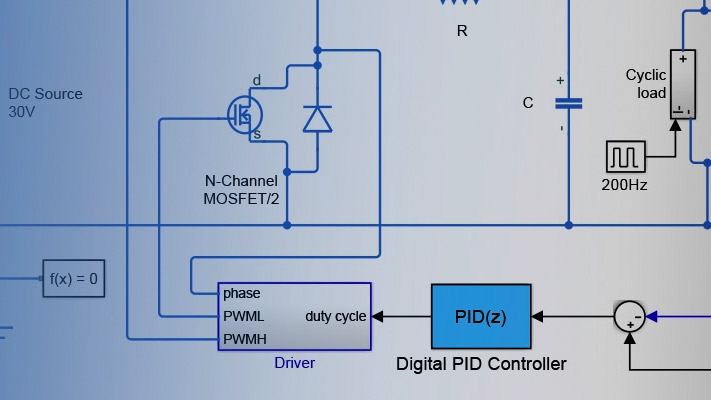
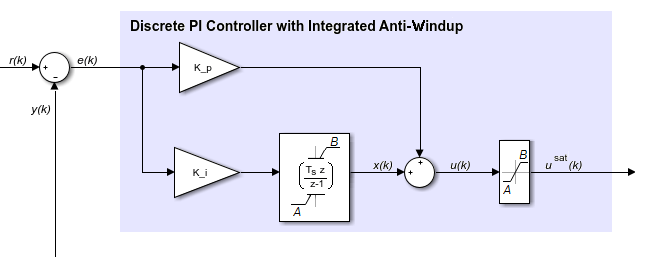
这具有整体防卷的离散PI控制器块利用内部防卷化实现离散PI控制。该图示出了具有内部防绕组的控制器的等效电路。
方程式
块使用向后欧拉离散化方法计算控制信号:
在哪里:
你是控制信号。
K.P.是比例增益系数。
E.是错误信号。
K.一世是积分增益系数。
T.S.是抽样期。
一种是饱和度的下限。
B.是饱和度的上限。
港口
输入
输出
参数

参考
[1]IEEE推荐用于电力系统稳定性研究的励磁系统模型的实践。IEEE STD 421.5 / D39。Piscataway,NJ:Ieee-SA,2015。
扩展能力
在R2017B中介绍
您还可以从以下列表中选择一个网站: