phaseSpaceReconstruction
将观察到的时间序列转换为状态向量
语法
描述
XR= phaseSpaceReconstruction (<一个href="#d123e15501" class="intrnllnk">X,<一个href="#d123e15572" class="intrnllnk">滞后,<一个href="#d123e15532" class="intrnllnk">昏暗的)
使用approximateEntropy,<一个href="//www.tianjin-qmedu.com/help/predmaint/ref/correlationdimension.html">correlationDimension,<一个href="//www.tianjin-qmedu.com/help/predmaint/ref/lyapunovexponent.html">lyapunovExponent使用
[<一个href="#d123e15784" class="intrnllnk">返回重构相空间XR,<一个href="#d123e15806" class="intrnllnk">eLag,<一个href="#d123e15832" class="intrnllnk">eDim= phasespacerconstruction (<一个href="#d123e15501" class="intrnllnk">X)
[<一个href="#d123e15784" class="intrnllnk">返回重构的相空间XR,<一个href="#d123e15806" class="intrnllnk">eLag,<一个href="#d123e15832" class="intrnllnk">eDim= phasespacerconstruction (<一个href="#d123e15501" class="intrnllnk">X,<一个href="#d123e15572" class="intrnllnk">滞后)
[<一个href="#d123e15784" class="intrnllnk">返回重构的相空间XR,<一个href="#d123e15806" class="intrnllnk">eLag,<一个href="#d123e15832" class="intrnllnk">eDim= phasespacerconstruction (<一个href="#d123e15501" class="intrnllnk">X[],<一个href="#d123e15532" class="intrnllnk">昏暗的)
[<年代p一个ncl一个年代年代="argument_placeholder">___= phasespacerconstruction (<年代p一个ncl一个年代年代="argument_placeholder">___,<一个href="#namevaluepairarguments" class="intrnllnk">名称,值)返回重构的相空间<一个href="#d123e15784" class="intrnllnk">XR带有一个或多个指定的附加选项
phaseSpaceReconstruction (<年代p一个ncl一个年代年代="argument_placeholder">___)在没有输出参数的情况下,通过沿对角线的直方图绘制重建相空间子轴的矩阵。
例子
使用相空间重构重构数据
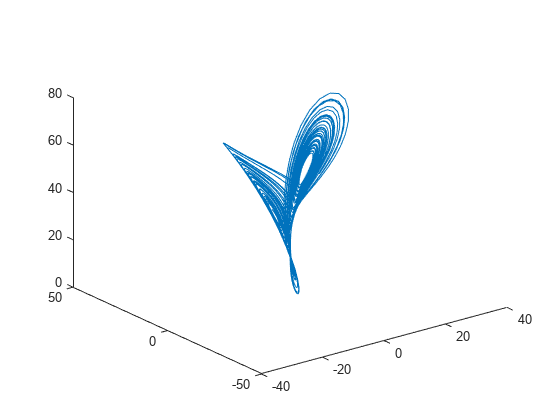
在这个例子中,假设你有一个洛伦兹吸引子的测量值。你的测量只是沿着x方向,但吸引子是一个三维系统。利用这些有限的数据,重构相空间,使原始系统的性质得以保留。
加载洛伦兹吸引子数据并将其可视化
负载(<年代p一个n年代tyle="color:#A020F0">“lorenzAttractorExampleData.mat”,<年代p一个n年代tyle="color:#A020F0">“数据”);plot3(数据(:1),数据(:,2),数据(:,3));
使用x方向测量估计滞后和尺寸。
Xdata = data(:,1);[~,eLag,eDim] = phasespacerconstruction (xdata)
eLag = 10
eDim = 3
由于洛伦兹吸引子有三维数据,估计的嵌入维数
利用估计的滞后和嵌入维数来可视化重构的相空间。
phaseSpaceReconstruction (xdata eLag eDim);

从3x3相空间图观察,吸引子的拓扑结构被恢复。<年代p一个ncl一个年代年代="inlineequation"> 而且<年代p一个ncl一个年代年代="inlineequation"> 用估计滞后值10重构其他两个状态。对角线图(1,1),(2,2)和(3,3)表示的直方图<年代p一个ncl一个年代年代="inlineequation"> ,<年代p一个ncl一个年代年代="inlineequation"> 而且<年代p一个ncl一个年代年代="inlineequation"> 数据,分别。
输入参数
输出参数
算法
相空间重构
对于均匀采样的单变量时间信号<年代p一个ncl一个年代年代="inlineequation">
,
在那里,<年代p一个ncl一个年代年代="inlineequation">N是时间序列的长度,<年代p一个ncl一个年代年代="inlineequation">τ<年代ub>1是滞后,还是<年代p一个ncl一个年代年代="inlineequation">米<年代ub>1嵌入尺寸是<年代p一个ncl一个年代年代="inlineequation">X<年代ub>1.
类似地,对于多元时间序列
phaseSpaceReconstruction计算每个时间序列的重构为:
在哪里
延迟估计
用平均互信息(AMI)估计相空间重构的时延。重构时,将时延设置为AMI的第一个局部最小值。
平均互信息计算为:
在那里,<年代p一个ncl一个年代年代="inlineequation">N时间序列的长度和<年代p一个ncl一个年代年代="inlineequation">Τ= 1:
嵌入维数估计
采用伪近邻算法估计相空间重构的嵌入维数。
这一点<年代p一个ncl一个年代年代="inlineequation">我在维<年代p一个ncl一个年代年代="inlineequation">d,点<年代p一个ncl一个年代年代="inlineequation">X<年代up>r我和它的最近点<年代p一个ncl一个年代年代="inlineequation">X<年代up>r *我在重构相空间中<年代p一个ncl一个年代年代="inlineequation">{
在那里,<年代p一个ncl一个年代年代="inlineequation"> 是距离度量。
预估嵌入尺寸
PercentFalseNeighbors在那里,<年代p一个ncl一个年代年代="inlineequation">p<年代ub>模糊神经网络为重构相空间中FNN点与总点数的比值。
参考文献
罗兹,卡尔和莫拉里,曼弗雷德。伪近邻算法与噪声破坏时间序列<年代p一个ncl一个年代年代="emphasis">物理评论。E.55.10.1103 / PhysRevE.55.6162。
[2] Kliková, B.,和Aleš Raidl。利用时滞方法重构动力系统的相空间。<年代p一个ncl一个年代年代="emphasis">第20届博士生年会论文集2011年改进算法。
[3] I. Vlachos, D. Kugiumtzis,“多元时间序列预测的状态空间重构”,<年代p一个ncl一个年代年代="emphasis">复杂系统中的非线性现象,第11卷第2期,页241-249,2008。
[4] Kantz, H.和Schreiber, T.。<年代p一个ncl一个年代年代="emphasis">非线性时间序列分析.剑桥:剑桥大学出版社,2004年第7卷。
另请参阅
approximateEntropy|<年代p一个n我te米年代cope我te米type="//www.tianjin-qmedu.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">lyapunovExponent|<年代p一个n我te米年代cope我te米type="//www.tianjin-qmedu.com/help/schema/MathWorksDocPage/SeeAlso" itemprop="seealso">correlationDimension
选择网站
选择一个网站,在可用的地方获得翻译的内容,并查看当地的活动和优惠。根据您所在的位置,我们建议您选择:<年代trong class="recommended-country">.
选择<年代p一个ncl一个年代年代="recommended-country">网站您也可以从以下列表中选择一个网站:
