Tsaregular.GydF4y2Ba
定期信号的时间同步平均信号GydF4y2Ba
句法GydF4y2Ba
描述GydF4y2Ba
yGydF4y2Ba= tsaregular(GydF4y2BaXGydF4y2Ba那GydF4y2BaFS.GydF4y2Ba那GydF4y2Barpm.GydF4y2Ba那GydF4y2Ba订单GydF4y2Ba)GydF4y2BayGydF4y2Ba时间同步平均(TSA)信号矢量GydF4y2BaXGydF4y2Ba使用抽样率GydF4y2BaFS.GydF4y2Ba,转速GydF4y2Barpm.GydF4y2Ba以及待保留的订单GydF4y2Ba订单GydF4y2Ba。GydF4y2BayGydF4y2Ba通过保留初级频率,组件来计算GydF4y2Ba订单GydF4y2Ba以及他们各自的谐波GydF4y2BaXGydF4y2Ba。您可以使用GydF4y2BayGydF4y2Ba进一步提取旋转机械条件指标以进行预测维护。例如,提取GydF4y2BaFM0.GydF4y2Ba指标从GydF4y2BayGydF4y2Ba在识别齿轮箱中的齿轮齿破损或厚重磨损等重大变化是有用的。GydF4y2Ba
yGydF4y2Ba= tsaregular(GydF4y2BaXGydF4y2Ba那GydF4y2BaT.GydF4y2Ba那GydF4y2Barpm.GydF4y2Ba那GydF4y2Ba订单GydF4y2Ba)GydF4y2BayGydF4y2BaTSA信号矢量GydF4y2BaXGydF4y2Ba相应的时间值来自GydF4y2BaT.GydF4y2Ba。GydF4y2Ba
yGydF4y2Ba= tsaregular(GydF4y2BaXT.GydF4y2Ba那GydF4y2Barpm.GydF4y2Ba那GydF4y2Ba订单GydF4y2Ba)GydF4y2BayGydF4y2Ba存储在时间表中的TSA信号GydF4y2BaXT.GydF4y2Ba。GydF4y2BaXT.GydF4y2Ba必须包含单个数字列变量。GydF4y2Ba
[GydF4y2Ba返回幅度频谱GydF4y2BayGydF4y2Ba那GydF4y2BaS.GydF4y2Ba] = Tsaregular(GydF4y2Ba___GydF4y2Ba)GydF4y2BaS.GydF4y2Ba常规信号GydF4y2BayGydF4y2Ba。GydF4y2BaS.GydF4y2Ba是使用归一化快速傅里叶变换(FFT)计算的幅度谱GydF4y2BayGydF4y2Ba。GydF4y2Ba
___GydF4y2Ba= tsaregular(GydF4y2Ba___GydF4y2Ba那GydF4y2Ba允许您使用一个或多个名称值对参数指定其他参数。您可以使用任何先前输入和输出参数使用此语法。GydF4y2Ba名称,价值GydF4y2Ba)GydF4y2Ba
Tsaregular(GydF4y2Ba___GydF4y2Ba)GydF4y2Ba没有输出参数绘制原始和常规TSA信号的时域和频域图。GydF4y2Ba
例子GydF4y2Ba
查找并可视化化合物TSA信号的常规信号GydF4y2Ba
考虑具有由电动机驱动的六个齿轮的动机,如下图所示。电机轴上的齿轮1与齿轮2啮合,齿轮比为17:1。最终的齿轮比,即齿轮1和2和齿轮3和4之间的比例为51:1。齿轮5也在电动机轴上,带有齿轮6的齿轮件为10:1的齿轮6。电动机在180rpm下旋转,振动传感器的采样率为50 kHz。为了保留包含齿轮1和2的啮合部件的信号,齿轮3和4以及轴旋转,请指定其17和51的齿轮比GydF4y2Ba订单GydF4y2Ba。对应于轴旋转(Order = 1)的信号分量总是隐含地包括在计算中。GydF4y2Ba

RPM = 180;fs = 50e3;t =(0:1 / fs:(1/3)-1 / fs)';GydF4y2Ba%样本时间GydF4y2BaOrderList = [17 51];f = rpm / 60 * [1 orderlist 10];GydF4y2Ba
在实践中,您将使用诸如从加速度计获得的振动信号的测量数据。对于此示例,生成TSA信号GydF4y2BaXGydF4y2Ba,这是安装在电机上的振动传感器的模拟数据。GydF4y2Ba
X = SIN(2 * PI * F(1)* T)+ SIN(2 * PI * 2 * F(1)* T)+GydF4y2Ba......GydF4y2Ba%电机轴旋转和谐波GydF4y2Ba3 * sin(2 * pi * f(2)* t)+ 3 * sin(2 * pi * 2 * f(2)* t)+GydF4y2Ba......GydF4y2Ba%齿轮网振动和齿轮1和2的谐波GydF4y2Ba4 * sin(2 * pi * f(3)* t)+ 4 * sin(2 * pi * 2 * f(3)* t)+GydF4y2Ba......GydF4y2Ba%齿轮振动和齿轮3和4的谐波GydF4y2Ba2 * sin(2 * pi * 10 * f(1)* t);GydF4y2Ba用于齿轮5和6的%齿轮网振动GydF4y2Ba
使用采样时间,RPM和要保留的网格订单计算TSA信号的常规信号。GydF4y2Ba
Y = Tsaregular(X,T,RPM,OrderList);GydF4y2Ba
输出GydF4y2BayGydF4y2Ba是一种载体,其包含除齿轮网信号和齿轮5和6的谐波之外的所有内容。GydF4y2Ba
在绘图上可视化常规信号,原始TSA信号及其幅度谱。GydF4y2Ba
Tsaregular(X,FS,RPM,OrderList)GydF4y2Ba
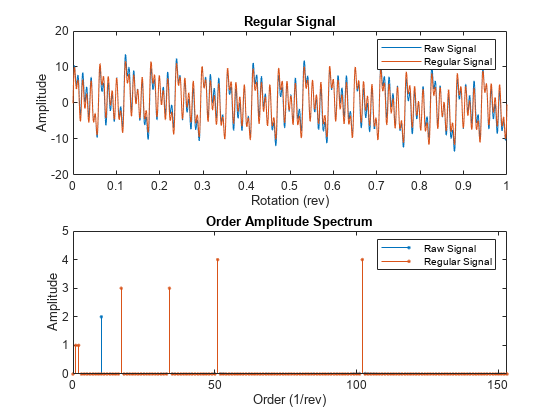
从幅度谱图,请遵守以下组件:GydF4y2Ba
第17阶的保留成分及其第34阶的谐波GydF4y2Ba
在第51阶的第二保留组件及其102d阶的谐波GydF4y2Ba
用于齿轮5和6的过滤的网状部件以第10级GydF4y2Ba
在第一和第2订单处的保留轴部件GydF4y2Ba
频谱图上的幅度匹配各个信号的幅度GydF4y2Ba
计算TSA信号的常规信号和幅度谱GydF4y2Ba
在这个例子中,GydF4y2Basinewavephasemod.mat.GydF4y2Ba包含相位调制的正弦波的数据。GydF4y2BaXT.GydF4y2Ba是一个与正弦波数据的时间表GydF4y2Barpm.GydF4y2Ba使用的是60 rpm。正弦波具有32 Hz的频率,并恢复未调制的正弦波,使用32作为GydF4y2Ba订单GydF4y2Ba。GydF4y2Ba
加载数据和所需的变量。GydF4y2Ba
加载(GydF4y2Ba'sinewavephasemod.mat'GydF4y2Ba那GydF4y2Ba'xt'GydF4y2Ba那GydF4y2Ba'rpm'GydF4y2Ba那GydF4y2Ba'订单'GydF4y2Ba)头(XT,4)GydF4y2Ba
ans =.GydF4y2Ba4×1时间表GydF4y2Ba时间数据__________________ 0秒0 0.00097656秒0.2011 0.0019531秒0.39399 0.0029297秒0.57078GydF4y2Ba
请注意时间值GydF4y2BaXT.GydF4y2Ba严格增加,等距和有限。GydF4y2Ba
计算常规信号及其幅度谱。设置价值GydF4y2Ba'领域'GydF4y2Ba到GydF4y2Ba'频率'GydF4y2Ba由于订单处于Hz。GydF4y2Ba
[Y,S] = Tsaregular(XT,RPM,订单,GydF4y2Ba'领域'GydF4y2Ba那GydF4y2Ba'频率'GydF4y2Ba)GydF4y2Ba
y =GydF4y2Ba1024×1时间表GydF4y2Ba时间数据______________ __________ 0秒-2.552e-15 0.00097656秒0.14928 0.0019531秒0.29283 0.0029297秒0.42512 0.0039062秒0.54108 0.0048828秒0.63624 0.0058594秒0.70695 0.0068359秒0.75049 0.0078125秒0.7652 0.0087891秒0.75049 0.0097656秒0.70695 0.010742秒0.63624 0.011719秒0.54108 0.012695秒0.425120.013672秒0.29283 0.014648秒0.14928⋮GydF4y2Ba
S =GydF4y2Ba1024×1复合物GydF4y2Ba0.0000 + 0.0000i 0.0000 - 0.0000i 0.0000 + 0.0000i 0.0000 + 0.0000i -0.0000 - 0.0000i -0.0000 - 0.0000i -0.0000 - 0.0000i -0.0000 + 0.0000i 0.0000 + 0.0000i -0.0000 - 0.0000i⋮GydF4y2Ba
输出GydF4y2BayGydF4y2Ba是包含常规信号的时间表,即未调制的正弦波,而GydF4y2BaS.GydF4y2Ba是包含常规信号的幅度谱的矢量GydF4y2BayGydF4y2Ba。GydF4y2Ba
可视化TSA信号的常规信号和幅度谱GydF4y2Ba
在这个例子中,GydF4y2Basinewaveampmod.mat.GydF4y2Ba包含幅度调制正弦波的数据。GydF4y2BaXGydF4y2Ba是振幅调制的正弦波数据以60rpm的轴速度获得的矢量。未调制的正弦波的频率为32 Hz和1.0单元的幅度。GydF4y2Ba
加载数据,并绘制幅度调制TSA信号的常规信号GydF4y2BaXGydF4y2Ba。要保留未调制的信号,请指定32 Hz的频率GydF4y2Ba订单GydF4y2Ba。设置价值GydF4y2Ba'领域'GydF4y2Ba到GydF4y2Ba'频率'GydF4y2Ba。GydF4y2Ba
加载(GydF4y2Ba'sinewaveampmod.mat'GydF4y2Ba那GydF4y2Ba'X'GydF4y2Ba那GydF4y2Ba'T'GydF4y2Ba那GydF4y2Ba'rpm'GydF4y2Ba那GydF4y2Ba'订单'GydF4y2Ba)Tsaregular(X,T,RPM,OrderList,GydF4y2Ba'领域'GydF4y2Ba那GydF4y2Ba'频率'GydF4y2Ba);GydF4y2Ba
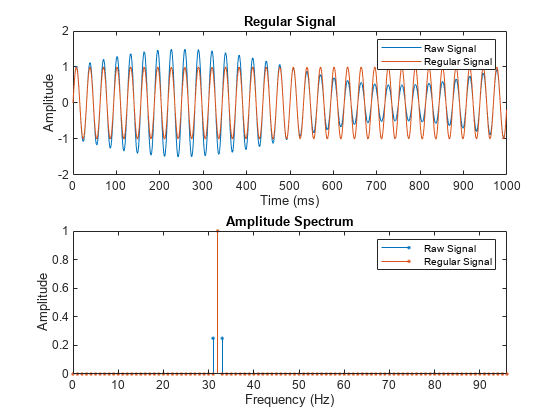
从绘图,分别观察常规和原始信号的波形和幅度谱。观察到常规信号包含未调整的正弦波,幅度为1.0单位和32Hz的频率。GydF4y2Ba
输入参数GydF4y2Ba
输出参数GydF4y2Ba
算法GydF4y2Ba
常规信号GydF4y2Ba
通过从信号频谱中保留以下方式从TSA信号计算常规信号:GydF4y2Ba
轴频率及其谐波GydF4y2Ba
齿轮啮合频率及其谐波GydF4y2Ba
可选地,在'中指定的边带GydF4y2Ba
numsidebands.GydF4y2Ba'在齿轮啮合频率及其谐波上GydF4y2Ba
Tsaregular.GydF4y2Ba使用带宽等于轴速度乘以值的值GydF4y2Banumsidebands.GydF4y2Ba',围绕兴趣的频率,计算GydF4y2BayGydF4y2Ba从TSA信号。常规信号与通过方程的残余信号有关GydF4y2Ba
。如果一阶边带保留在常规信号中,那么,GydF4y2Ba
。GydF4y2Ba
幅度谱GydF4y2Ba
常规信号的幅度谱如下计算,GydF4y2Ba
这里,GydF4y2BayGydF4y2Ba是常规信号。GydF4y2Ba
参考GydF4y2Ba
[1] McFadden,P.D.“通过啮合振动的时域平均值的信号处理来检查用于早期检测齿轮故障的技术。”GydF4y2BaAero推进技术备忘录434GydF4y2Ba。墨尔本,澳大利亚:航空研究实验室,1986年4月。GydF4y2Ba
[2]Večeř,P.,Marcel Kreidl和R.Šmíd。“变速箱监测系统的条件指示。”GydF4y2BaActa PolytechnicaGydF4y2Ba45.6(2005),第35-43页。GydF4y2Ba
[3] Zakrajsek,J.J.,Townsend,D.P和Decker,H. J.“齿轮故障检测方法分析应用于点疲劳失效数据。”GydF4y2Ba技术备忘录105950.GydF4y2Ba。美国宇航局,1993年4月。GydF4y2Ba
[4] Zakrajsek,James J.“齿轮网故障预测技术的调查。”美国国家航空航天局克利夫兰·奥·刘易斯研究中心,1989年。No. NASA-E-5049。GydF4y2Ba
也可以看看GydF4y2Ba
选择一个网站GydF4y2Ba
选择一个网站,以便在可用的地方进行翻译的内容,并查看本地活动和优惠。根据您的位置,我们建议您选择:GydF4y2Ba。GydF4y2Ba
选择GydF4y2Ba网站GydF4y2Ba您还可以从以下列表中选择一个网站:GydF4y2Ba
美洲GydF4y2Ba
- América拉丁GydF4y2Ba(Español)GydF4y2Ba
- 加拿大GydF4y2Ba(英语)GydF4y2Ba
- 美国GydF4y2Ba(英语)GydF4y2Ba
欧洲GydF4y2Ba
- 比利时GydF4y2Ba(英语)GydF4y2Ba
- 丹麦GydF4y2Ba(英语)GydF4y2Ba
- 德意志GydF4y2Ba(德意志)GydF4y2Ba
- España.GydF4y2Ba(Español)GydF4y2Ba
- 芬兰GydF4y2Ba(英语)GydF4y2Ba
- 法国GydF4y2Ba(Français)GydF4y2Ba
- 爱尔兰GydF4y2Ba(英语)GydF4y2Ba
- 意大利GydF4y2Ba(意大利语)GydF4y2Ba
- 卢森堡GydF4y2Ba(英语)GydF4y2Ba
- 荷兰GydF4y2Ba(英语)GydF4y2Ba
- 挪威GydF4y2Ba(英语)GydF4y2Ba
- Österreich.GydF4y2Ba(德意志)GydF4y2Ba
- 葡萄牙GydF4y2Ba(英语)GydF4y2Ba
- 瑞典GydF4y2Ba(英语)GydF4y2Ba
- 瑞士GydF4y2Ba
- 英国GydF4y2Ba(英语)GydF4y2Ba
亚太地区GydF4y2Ba
- 澳大利亚GydF4y2Ba(英语)GydF4y2Ba
- 印度GydF4y2Ba(英语)GydF4y2Ba
- 新西兰GydF4y2Ba(英语)GydF4y2Ba
- 中国人GydF4y2Ba
- 日本语GydF4y2Ba(日本语)GydF4y2Ba
- 한국GydF4y2Ba(한국어)GydF4y2Ba
