处理雷达反射与Demorad获得雷达传感器平台
介绍
这个例子演示了如何处理和可视化调频连续波(FMCW)获得通过回声Demorad与相控阵雷达传感器平台系统工具箱™。默认情况下,I / Q样品从二进制文件读取和操作参数提供了这个例子。可选地,可以使用相同的过程来传输,接收和处理FMCW反射从现场I / Q和样品自己Demorad遵循指令后面的例子。获取和处理结果在一个环境减少开发时间和促进了雷达信号处理系统的快速原型。
所需的硬件和软件
这个例子需要相控阵系统工具箱™。
现场处理:
可选地,模拟设备®Demorad雷达传感器平台(司机)
模拟设备®Demorad雷达传感器平台操作24 GHz频率250 MHz带宽的上限。平台上的数组包含2传输元素和4接收元素。接收元素间距为每半波的操作频率、安排的线性数组。传输元素也安排一个线性阵列和间距为3 half-wavelengths。传输和接收元素中可以看到下面的图片。
安装驱动程序和插件
下载Demorad司机和MATLAB模拟装置所提供的文件从usb驱动器与Demorad®
你的电脑上保存这些永久性位置
包含MATLAB文件的文件夹添加到MATLAB永久道路
权力Demorad,通过微型usb端口连接到个人电脑
导航到设备管理器和寻找“BF707散装设备”
右键单击“BF707散装设备”,选择“更新驱动程序”
选择选项“浏览我的电脑驱动程序软件”
浏览并选择“驱动程序”文件夹从usb驱动器
安装相控阵系统工具箱™附加的Demorad MATLAB附加组件管理器
雷达的设置和连接
在本节中,我们设置I / Q样本的来源作为默认选项的二进制文件阅读器。也包含在这个文件的参数定义传输FMCW唧唧喳喳,当时写的文件被创建。如果你想运行这个例子使用回声从Demorad生活,遵循的步骤安装驱动程序和插件并设置下面的“usingHW”标记“真正的”。这个例子会与Demorad通信传输一个FMCW波形与下面的雷达操作参数定义和发送MATLAB的倒影。下面的“设置”方法是代表Demorad定义的对象。“设置”是权力Demorad发送参数。
usingHW = false;%设置为“true”使用Demorad雷达传感器平台如果~ usingHW% I / Q样本记录读取二进制文件radarSource = RadarBasebandFileReader (”。/ DemoradExampleIQData.bb ',256);其他的% Demorad平台实例化接口radarSource = DemoradBoard;radarSource。SamplesPerFrame = 256;%样本每帧的数量radarSource。AcquisitionTime = 30;%的时间获取样本(s)%定义操作参数radarSource。R一个米pTime = 280e-6;%脉冲斜坡时间(年代)radarSource。革命制度党= 300 e-6;%脉冲重复间隔(s)radarSource。StartFrequency = 24 e9;%脉冲启动频率(赫兹)radarSource。StopFrequency = 24.25 e9;%的脉搏停止频率(赫兹)radarSource。NumChirps = 1;%的脉冲数的过程%与Demorad建立连接设置(radarSource);结束
雷达功能
基于上面定义的操作参数,雷达系统的特点可以被定义为处理和可视化的反射。使用的方程计算雷达系统的功能可以看到这些操作参数如下:
距离分辨率
雷达的距离分辨率(单位:米)与线性调频波形是由方程定义的
,
在哪里 在赫兹发射脉冲的带宽:
c0 = physconst (“光速”);wfMetadata = radarSource.Metadata;%的波形结构元数据带宽= wfMetadata.StopFrequency…——wfMetadata.StartFrequency;%唧唧喳喳的带宽(赫兹)管理员= c0 /(2 *带宽)%距离分辨率(m)
管理员= 0.5996
最大射程
Demorad平台传输FMCW脉冲啁啾,或锯齿波形。因此,雷达的理论最大值范围(单位:米)可以使用计算
,
在哪里 啁啾率。有效范围在实践中可能会有所不同,由于环境因素如信噪比(信噪比),干扰,或测试设备的大小。
kf =带宽/ wfMetadata.RampTime;%啁啾率maxRange = radarSource.SampleRate * c0 / (2 * kf)%最大范围(米)
maxRange = 158.2904
波束宽度
雷达有效的波束宽度的板可以近似方程
,
在哪里 脉冲的波长和吗 是元素间距。
λ= c0 / radarSource.CenterFrequency;%信号波长(m)rxElementSpacing =λ/ 2;波束宽度= rad2deg(λ/…(radarSource.NumChannels * rxElementSpacing))%有效的波束宽度(度)
波束宽度= 28.6479
传输的带宽250 MHz和第4单元接收数组,范围和角分辨率是足以解决多个紧密间隔的对象。I / Q二进制文件中记录的样本从Demorad平台返回没有任何额外的数字处理。FMCW Demorad反映收到的下转换硬件基带,摧毁,转移到MATLAB。
信号处理组件
用于信号处理的算法循环初始化在这一节中。在I / Q样品已收到,3-pulse消除器消除检测从静止的对象。然后beamformed 3-pulse补偿器的输出并用来计算响应范围。CFAR检测器使用范围后响应算法来检测移动目标。
3-Pulse消除器
收购后的3-pulse抵消使用I / Q样本删除任何固定杂波环境中。给出的脉冲响应3-pulse消除器
这个方程是在下面的定义脉冲消除器算法实现的。
threePulseCanceller = PulseCanceller (“NumPulses”3);
响应范围
算法计算范围下面初始化反应。波束形成的传感器阵列建模使用天线元素的数量和接收元素的间距。传感器阵列模型和工作频率的Demorad所需的波束形成算法。因为Demorad传达一个FMCW波形,响应使用FFT计算范围。
antennaArray = phased.ULA (“NumElements”radarSource.NumChannels,…“ElementSpacing”,rxElementSpacing);beamFormer = phased.PhaseShiftBeamformer (“SensorArray”antennaArray,…“方向”(0,0),“OperatingFrequency”,radarSource.CenterFrequency);%设置算法进行处理NFFT = 4096;rangeResp = phased.RangeResponse (…“DechirpInput”假的,…“RangeMethod”,FFT的,…“ReferenceRangeCentered”假的,…“PropagationSpeed”c0,…“SampleRate”radarSource.SampleRate,…“SweepSlope”kf * 2,…“RangeFFTLengthSource”,“属性”,…“RangeFFTLength”NFFT,…“RangeWindow”,“损害”);
CFAR检测器
恒虚警率(CFAR)检测器用于检测任何移动目标。
cfar = phased.CFARDetector (“NumGuardCells”6“NumTrainingCells”10);
作用域
设置范围查看FMCW反射处理。我们的观察窗设置range-time强度范围为15秒。
时间间隔= 15;% Demorad返回数据每128个脉冲重复间隔rangeScope = phased.RTIScope (…“RangeResolution”maxRange / NFFT…“TimeResolution”wfMetadata.PRI * 128,…“时间间隔”时间间隔,…“IntensityUnits”,“权力”);
仿真和可视化
接下来,收到样品从二进制文件阅读器,加工,和范围所示。这个循环将继续,直到所有的样本都读取二进制文件。如果使用Demorad,循环将持续30秒,由“AcquisitionTime”属性定义对象的代表。只显示范围从0到15米,因为我们有先验知识目标二进制文件中记录的是在这个范围内。
而~结束(radarSource)% I / Q样本检索样本来源x = radarSource ();%从移动对象和beamform抵消任何脉冲y = threePulseCanceller (x);y = beamFormer (y);%计算响应范围和权力转换resp = rangeResp (y);rangepow = abs(职责)^ 2;%使用CFAR检测器来检测任何移动目标0 - 15米maxViewRange = 15;rng_grid = linspace (0 maxRange NFFT)。”;[~,maxViewIdx] = min (abs (rng_grid - maxViewRange));detIdx = false (NFFT, 1);detIdx (1: maxViewIdx) = cfar (rangepow, 1: maxViewIdx);%去除non-detections和设置一个噪声地板在峰值的1/10rangepow = rangepow. / max (rangepow (:));%规范化检测noiseFloor = 1 e 1;rangepow (~ detIdx & (rangepow < noiseFloor)) = noiseFloor;%显示range-time强度范围从0 - 15米的范围rangeScope (rangepow (1: maxViewIdx));结束
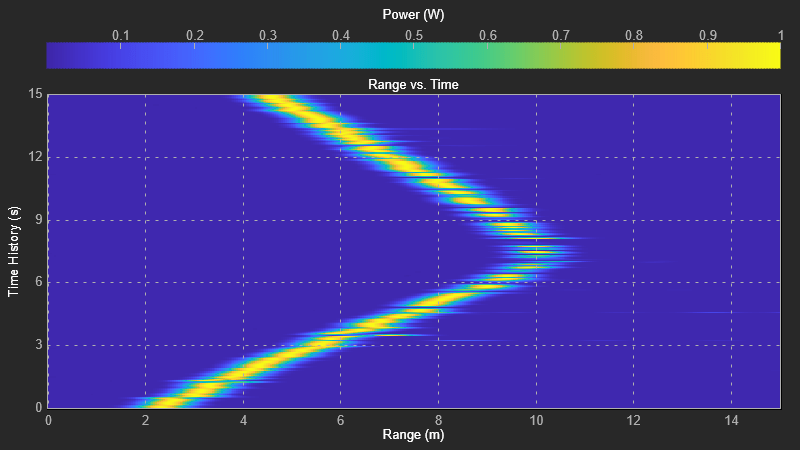
范围显示单个目标远离Demorad雷达传感器平台直到~ 10米远,然后再次改变方向移动回到平台。range-time强度范围显示了检测范围。
总结
这个案例展示了如何与模拟设备接口®Demorad雷达传感器平台获取、过程,并从实时数据可视化雷达反射。这种能力使雷达信号处理系统的快速原型和测试在一个环境,大大减少开发时间。