卫星星座进入地面站
这个例子演示了如何建立一个地面站和卫星星座上的锥形传感器之间的访问分析。地面站和锥形传感器属于卫星据说访问另一个如果地面站在锥形传感器的视场和锥形传感器的仰角对地面站大于或等于后者的最低仰角。该方案包括一个由40颗近地轨道卫星组成的星座和一个地理位置。每颗卫星都有一个90度视场的照相机。整个卫星星座的任务是拍摄位于北纬42.3001度和西经71.3504度的地理位置。这些照片需要在2020年5月12日下午1时(国际标准时间)至2020年5月12日下午7时(国际标准时间)期间拍摄,此时场地被太阳充分照明。为了在最小的大气失真的情况下拍摄到高质量的图片,卫星相对于该地点的仰角应至少为30度(请注意30度是为了说明目的而任意选择的)。在这6小时的间隔期间,需要确定每颗卫星可以拍摄该地点的时间。还需要确定在这段时间内,至少有一颗卫星的摄像机可以看到该地点的时间百分比。这个百分比的数量称为系统范围的访问百分比。
创建卫星方案
使用创建一个卫星场景satelliteScenario.使用datetime设置开始时间为12-May-2020下午1:00:00 UTC,停止时间为12-May-2020下午7:00:00 UTC。将模拟示例时间设置为30秒。
开始时间= datetime(2020、5、12、13日,0,0);stopTime = startTime + hours(6);sampleTime = 30;%秒sc = satelliteScenario(开始时间、stopTime sampleTime)
sc =卫星场景与属性:StartTime: 12-May-2020 13:00:00 StopTime: 12-May-2020 19:00:00 SampleTime: 30观众:[0×0 matlabshared.卫星场景。卫星:[1×0 matlabshared.卫星场景。地面站:[1×0 matlabshared.satellitescenario.]GroundStation]汽车展:1
将卫星添加到卫星场景
使用卫星从TLE文件中添加卫星到场景leoSatelliteConstellation.tle.TLE文件定义了40颗普通卫星在近圆低地球轨道上的平均轨道参数,其高度和倾角分别约为500公里和55度。
tleFile =“leosatelliteconstellation.thtle”;tleFile坐=卫星(sc)
卫星阵列具有属性:名称ID圆锥传感器Gimbals发射器接收器访问地面轨道轨道传播器markcolor marksize ShowLabel LabelFontColor LabelFontSize
给卫星添加摄像头
使用conicalSensor给每个卫星加一个锥形传感器。这些锥形传感器代表摄像头。指定他们MaxViewAngle为90度,定义视野。
为了IDX = 1:numel(sat)name = sat(idx).name +“相机”;conicalSensor(坐(idx),“名称”、名称、“MaxViewAngle”, 90);结尾%检索相机凸轮= [sat.ConicalSensors]
cam = 1x40圆锥传感器阵列属性:Name ID MountingLocation MountingAngles MaxViewAngle访问FieldOfView
定义在卫星场景中拍摄的地理位置
使用groundStation增加一个地面站,它代表要拍摄的地理位置。指定其MinElevationAngle30度。如果不指定经纬度,则默认为北纬42.3001度,西经71.3504度。
名称=“地理位置”;minElevationAngle = 30;%度Geosite =地面(SC,...“名称”、名称、...“MinElevationAngle”minElevationAngle)
geoSite =地站属性:名称:地理站点ID: 81纬度:42.3度经度:-71.35度海拔:0米MinElevationAngle: 30度ConicalSensors: [1x0 matlabshare .satellitescenario.]Gimbals: [1x0 matlabshared.卫星场景。发射器:[1x0 satcom.卫星场景。接收器:[1x0 satcom.卫星场景。访问:[1x0 matlabshared.卫星场景。Access] markcolor: [0 1 1] marksize: 10 ShowLabel: true LabelFontColor: [0 1 1] LabelFontSize: 15
在摄像机和地理位置之间添加访问分析
使用访问在每个摄像头和地理位置之间添加访问分析。访问分析将用于确定每台相机何时可以拍摄该地点。
为了IDX = 1:NUMER(CAM)接入(CAM(IDX),GEOSE);结尾%获取访问分析对象ac = [cam.Accesses];%访问分析对象属性交流(1)
ANS =具有属性的访问:序列:[41 81] LineWidth:1 LineColor:[0.5 0 1]
想象这个场景
使用SatelliteScenarioviewer.发射卫星场景查看器并将场景可视化。
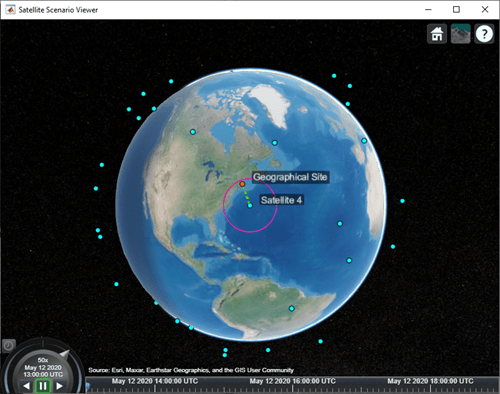
v = satelliteScenarioViewer (sc);

观看者可以用作视觉确认,即该方案已经正确设置。紫线表示卫星4上的相机和地理位置可以彼此访问。这意味着地理位置在相机的视野中,相机的仰角相对于网站大于或等于30度。出于这种情况的目的,这意味着相机可以成功拍摄该网站。
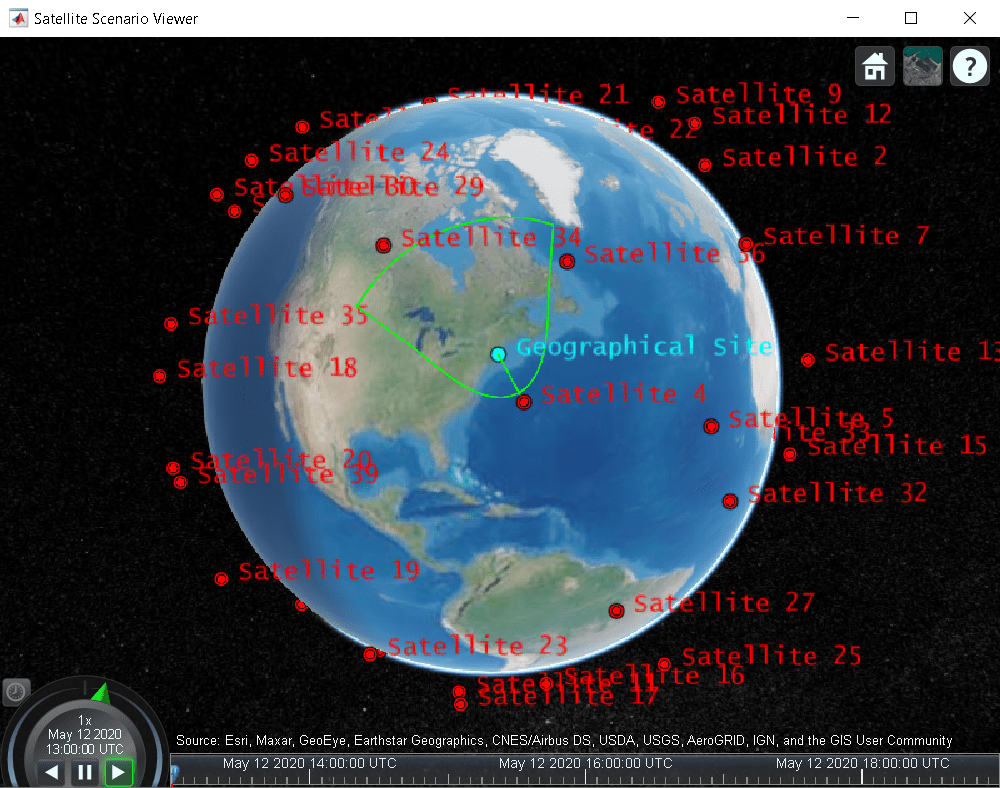
形象化的视野的相机
使用fieldOfView可视化4号卫星上每个摄像头的视场。
fov = fieldofview(cam([cam.name] ==“卫星相机4”))
fov = FieldOfView with properties: LineWidth: 1 LineColor: [0 1 0] VisibilityMode: 'inherit'
轮廓线内的地理位置的存在是一个视觉上的确认,它是在4号卫星上的相机的视野内。
自定义可视化
使用隐藏隐藏卫星轨道,使图像更加清晰。
隐藏([sat.orbit]);

将访问可视化的颜色更改为绿色。
为了IDX = 1:NUMER(AC)AC(IDX).linecolor =“绿色”;结尾

确定摄像机可以拍摄地理位置的时代
使用AccessIntervals.确定每个摄像头与地理位置之间的访问时间。这是相机可以拍摄现场的时候。
accessIntervals (ac)
ans =30×8表源目标IntervalNumber开始时间结束时间持续时间StartOrbit EndOrbit _____________________ ___________________ ______________ ____________________ ____________________ ________ ________ __________ “卫星1个相机”, “地理网站” 1 12日-2020 13时36分00秒12月-2020 13点39分30秒210 11“卫星1相机“”地理网站“2 12-5月2020 15:23:00 12-5月2020 15:25:00 120 2”卫星2相机“”地理位置“1 12-5月20日-2020 14:30 14:30:30 12 - 5月2020年14:34:30 240 1 1“卫星3相机”“地理现场”1 12-5月2020年13:28:30 12-5月20日13:32:30 240 1 1“卫星4相机“”地理网站“1 12-5月20日 - 5月13:00:00 12-5月2020年13:02:30 150 1 1”卫星4相机“”地理位置“2 12-5月2020年14:46:00 12-May-2020 14:48:30 150 2 2“卫星5相机”“地理位置”1 12-5月20日 - 2020 16:28:30 12-5月2020 16:33:00 270 3 3“卫星6相机“”地理网站“1 12-5月20日17:05:30 12-5月20日17:09:30 240 3 3”卫星7相机“”地理位置“1 12-5月20日20 16:20:00 12-May-2020 16:24:30 270 2 3“卫星8相机”“地理位置”1 12-5月12日 - 2020 15:18:00 12-5月20日15:20:00 1202 2“卫星8相机”“地理现场”2 12-5月20日17:03:30 12-May-2020 17:07:00 210 3 3“卫星9相机”“地理位置”1 12-5月12日 - 202017:55:30 12-May-2020 17:57:00 90 3 3“卫星10相机”“地理网站”1 12-5月20日-2020 18:44:30 12-5月20日18:49:00 270 44“卫星11相机”“地理网站”1 12-5月20日18:39:30 12-5月20日18:44:00 270 4 4“卫星12相机”“地理位置”1 12-5月12日 - 2020年17:58:00 12-May-2020 18:01:00 180 3 3“卫星29相机”“地理现场”1 12-5月20日 - 2020年13:09:30 12-5月20日13:13:30 240 1 1⋮
上表包括每个间隔的开始和结束时间,在此期间给定的相机可以拍摄该站点。报告每个间隔的持续时间以秒为单位。Startorbit和Endorbit是当访问开始和结束时相机附加到相机连接的卫星的轨道计数。计数从方案开始时间开始。
使用玩将场景从开始时间到停止时间的模拟可视化。可以看出,每当相机可以拍摄地理位置时,绿线就会出现。
玩(sc);

计算系统访问百分比
除了确定每个相机可以拍摄地理站点的时间外,还需要确定系统范围的访问百分比,即从场景开始时间到至少一颗卫星可以拍摄站点的停止时间的百分比。计算方法如下:
对于每个摄像头,计算访问状态历史站点使用
accessStatus.对于给定的摄像机,这是一个逻辑行向量,向量中的每个元素表示对应于给定时间样本的访问状态。的值真正的表明摄像机可以拍摄该地点在该特定时间样本。执行逻辑
或在所有这些行向量上对应每个摄像机对站点的访问。这将产生一个逻辑的单行向量,其中,如果至少有一个摄像机可以在一个场景样本时间为30秒的时间内,在相应的时间样本中拍摄场地,则给定元素为真。计算值为的向量中元素的数量
真正的.将这个数值乘以30秒的采样时间,以确定当至少有一台相机可以拍摄该站点时的总时间(秒)。将这个数量除以6小时的场景持续时间,然后乘以100,就得到系统范围的访问百分比。
为了id = 1:numel(ac) [s,time] = accessStatus(ac(idx));如果Idx == 1%在第一次迭代中初始化系统范围的访问状态向量systemWideAccessStatus = s;其他的%通过执行逻辑或更新系统范围的访问状态向量%,其访问状态为当前摄像头站点访问%的分析systemWideAccessStatus =或(systemWideAccessStatus s);结尾结尾
使用阴谋绘制系统范围内的访问状态与时间的关系图。
绘图(时间,systemwideaccessstatus,“线宽”2);网格在;包含(“时间”);ylabel (“系统范围的访问状态”);

当系统范围的访问状态为1时(真正的),至少有一台相机可以拍摄该网站。
使用NNZ.确定中元素的数量systemWideAccessStatus的值是真正的.
n = nnz(systemwideaccessstatus)
n = 203
确定至少一个相机可以拍摄该站点的总时间。这是通过乘以数量来实现的真正的元素由场景的示例时间决定。
systemWideAccessDuration = n * sc。SampleTime%秒
systemWideAccessDuration = 6090
使用秒计算场景总时长。
场景=秒(sc.stoptime - sc.starttime)
scenarioDuration = 21600
计算系统访问百分比。
systemWideAccessPercentage = (systemWideAccessDuration / scenarioDuration) * 100
systemWideAccessPercentage = 28.1944
通过让摄像头跟踪地理站点来提高系统范围的访问百分比
卫星的默认姿态是这样的:它们的偏航轴直接指向最低点(即卫星正下方的地球上的点)。由于相机默认与偏航轴对齐,它们也指向垂直向下。因此,在相机的仰角低于30度之前,地理位置就超出了相机的视野范围。因此,累计访问百分比受到相机视场的限制。
相反,如果相机总是指向那个地理位置,那么只要地球不挡住视线,后者就总是在相机的视野之内。因此,全系统的访问百分比现在将受到MinElevationAngle而不是摄像机的视野。在前一种情况下,当场地进入和离开摄像机的视野时,访问间隔开始和结束。它在相机仰角超过30度后进入视场,在它的仰角低于30度之前离开视场。然而,如果摄像机一直指向场地,则进入间隔将在仰角超过30度时开始,在仰角低于30度时结束,从而增加间隔的持续时间。因此,整个系统的访问百分比也将增加。
由于照相机被严格地固定在卫星上,每颗卫星都需要沿着其轨道不断地调整方向,以便其偏航轴跟踪地理位置。当相机与偏航轴对齐时,它们也会指向现场。使用pointAt使每颗卫星的偏航轴线跟踪地理网站。
为了idx = 1:numel(sat) pointAt(sat(idx),geoSite);结尾
重新计算系统范围的访问百分比。
%计算全系统访问状态为了id = 1:numel(ac) [s,time] = accessStatus(ac(idx));如果Idx == 1%在第一次迭代中初始化系统范围的访问状态向量systemWideAccessStatus = s;其他的%通过执行逻辑或更新系统范围的访问状态向量%与当前相机-网站组合的访问状态systemWideAccessStatus =或(systemWideAccessStatus s);结尾结尾%计算系统访问百分比n = nnz (systemWideAccessStatus);systemWideAccessDuration = n * sc.SampleTime;systemWideAccessPercentageWithTracking = (systemWideAccessDuration / scenarioDuration) * 100
systemWideAccessPercentageWithTracking = 38.3333
整个系统的访问百分比提高了约36%。这是摄像机不断指向地理位置的结果。这可以通过使用玩一次。
玩(sc)
视场轮廓不再是圆形的,因为相机不再直指向下,因为它正在跟踪地理位置。
探索的例子
此示例演示了如何确定星座上的卫星在星座上的次数可以拍摄地理位置。使用锥形传感器建模相机,并使用访问分析来计算相机可以拍摄现场的时间。此外,计算系统范围的访问百分比以确定当至少一个卫星可以拍摄该网站时6小时内的时间百分比。有人看出,这些结果取决于相机指向的方向。
这些结果也是一个函数:
卫星轨道
MinElevationAngle地理位置的安装位置和相机相对于卫星的位置
视野(
MaxViewAngle),如果它们不是连续地指向地理位置
根据您的需求修改上述参数,并观察它们对访问间隔和系统访问百分比的影响。通过使用开普勒轨道元素来明确指定卫星的轨道,可以改变卫星的轨道卫星.此外,摄像头可以安装在平衡环它可以独立于卫星进行旋转。通过这种方式,卫星可以垂直向下(默认行为),而gimbals可以配置,以便相机独立跟踪地理位置。
也可以看看
对象
功能
相关的例子
更多关于
你也可以从以下列表中选择一个网站: