主要内容
Tachorpm.
从转速表脉冲中提取RPM信号
描述
tachorpm(___)没有输出参数用检测的脉冲绘制所生成的RPM信号和转速计信号。
例子
rpm peak.
装载以300 Hz采样采样的模拟转速计信号。
加载Tacho.
计算和可视化RPM信号Tachorpm.使用默认值。
Tachorpm(yn,fs)
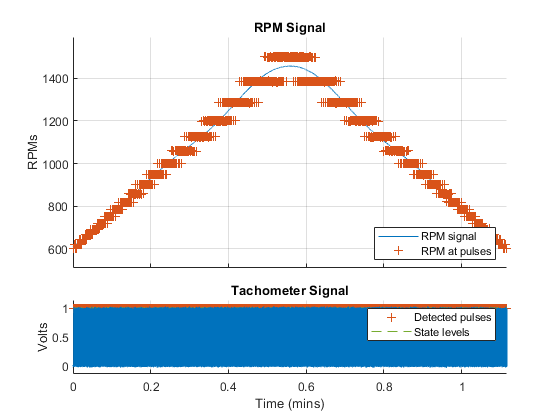
增加拟合点的数量以捕获RPM峰值。太多积分导致过度装备。通过在峰值周围的区域上放大来验证此结果。
tachorpm(yn,fs,'fitpoints',600)轴([0.47 0.65 1320 1570])

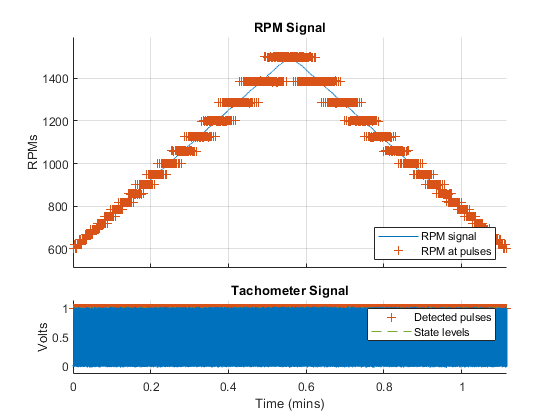
选择适度的点数以获得更好的结果。
tachorpm(yn,fs,'fitpoints',100)
将白色高斯噪声添加到转速表信号。默认脉冲查找机制会导致脉冲并返回锯齿状的信号配置文件。通过在两秒的时间间隔内放大来验证此结果。
RNG.默认WGN = RANDN(尺寸(yn))/ 10;Yn = Yn + WGN;[rpm,t,tp] = tachorpm(yn,fs,'fitpoints',100);图绘图(t,yn,tp,平均值(Interp1(t,yn,tp))*α(尺寸(tp)),'+') 抓住在sl = statelevels(yn);图(t,sl(1)*绘图(尺寸(t)),t,sl(2)* on(size(t))保持离开XLIM([9 10])

调整状态电平以改善脉冲发现。
SL = [0 0.75];[rpm,t,tp] = tachorpm(yn,fs,'fitpoints',100,'statelevels',sl);图(t,yn,tp,平均值(Interp1(t,yn,tp))* one(尺寸(tp)),'+') 抓住在图(t,sl(1)*绘图(尺寸(t)),t,sl(2)* on(size(t))保持离开XLIM([9 10])

输入参数
输出参数
算法
这Tachorpm.函数执行以下步骤:
用途
Statelevels.确定转速表信号的低和高状态。用途
差确定脉冲中心之间的时间间隔,并在间隔中点使用时计算RPM值RPM = 60 /δT.。如果
'fittype'被指定为'光滑的',然后该功能使用样条曲线执行最小二乘拟合。如果'fittype'被指定为'线性',然后该函数使用线性插值使用interp1.。
参考
[1] Brandt,Anders。噪声和振动分析:信号分析和实验程序。奇切斯特,英国:John Wiley&Sons,2011年。
[2] Vold,Håvard和Jan Leuridan。“使用卡尔曼跟踪过滤器以极端旋转率跟踪高分辨率追踪。”冲击和振动。卷。2,1995,第507-515页。
扩展能力
介绍在R2016B.
您还可以从以下列表中选择一个网站:
