主要内容
计算和显示顺序- rpm映射
产生由两个线性啁啾和一个二次啁啾组成的信号,所有在600赫兹采样5秒。在测试期间,产生信号的系统将转速从每秒10转提高到40转。
生成转速表读数。
fs = 600;t1 = 5;t = 0:1 / fs: t1;f0 = 10;f1 = 40;rpm = 60 * linspace (f0 f1长度(t));
线性啁啾有1阶和2.5阶。阶分量的振幅是另一阶分量的两倍。二次啁啾从第6阶开始,并在测量结束时返回到这个阶。振幅为0.8。使用这些信息创建信号。
o1 = 1;o2 = 2.5;o6 = 6;x = 2 *唧唧声(t, o1 * f0, t1, o1 * f1) +唧唧声(t, o2 * f0, t1, o2 * f1) +...0.8 *唧唧声(t, o6 * f0, t1, o6 * f1,“二次”);
计算信号的指令- rpm图。使用每个测量单元的峰值振幅。指定分辨率为0.25的订单。对数据加一个旁瓣衰减为50 dB的切比雪夫窗。
(地图,或者,rp) = rpmordermap (x, fs, rpm, 0.25,...“振幅”,“高峰”,“窗口”, {“chebwin”, 50});
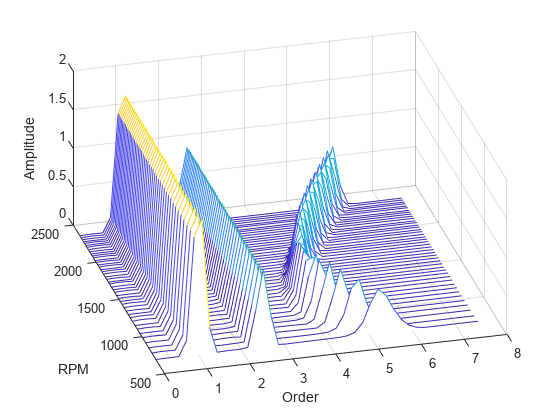
将订单- rpm图画成瀑布图。
(或者,RP) = meshgrid (RP);瀑布(或者,RP,地图”)视图(-15年,45)包含(“秩序”) ylabel (“转”) zlabel (“振幅”)
使用rpmordermap没有显示映射的输出参数。指定分辨率为0.2的顺序和相邻段之间80%的重叠。将切比雪夫窗口的旁瓣衰减设置为80 dB。
rpmordermap (x, fs, rpm, 0.2,...“振幅”,“高峰”,“OverlapPercent”, 80,“窗口”, {“chebwin”80})

另请参阅
orderspectrum|ordertrack|orderwaveform|rpmfreqmap|rpmordermap|tachorpm
你也可以从以下列表中选择一个网站:
