主要内容
创建型号组件的可互换变体
要为模型增添灵活性,以便它可以迎合不同的要求,可以使用变体子系统和模型。变体允许您选择单个模型中的组件的多种变体。您可以通过在Matlab®命令提示符下更改Variant控制变量的值来更改活动变量而无需修改模型。
模型ex_modeling_variants.包括操作员子系统的三种变体选择。
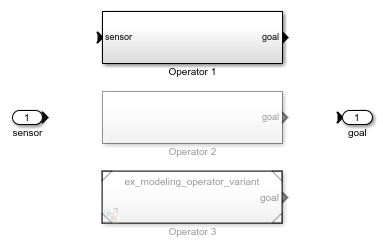
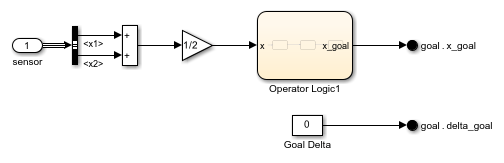
操作员1是主动变体,由脚本定义ex_modeling_variant_choice.m.。要确定机械系统的目标位置,该操作员将使用StateFlow®图表实现程序逻辑。
非活动变体及其内容是灰色的。为了定义机械系统位置的目标位置,非活动变量子系统操作器2使用波形发生器块。

变体选择操作员3是非活动变量模型。变体子系统块允许子系统和模型作为变体选择。
相关话题
您还可以从以下列表中选择一个网站: