主要内容
使用线路传感器的碰撞检测
vrcollisions示例显示了如何在Simulink®3D动画™中实现碰撞检测的简单方法。万博1manbetx
在虚拟世界中,定义了X3D LinePickSensor。该传感器检测几个光线的近似冲突(建模为索引模型),在场景中具有任意几何形状。在几何基元的情况下,检测到确切的碰撞。LinePickSensor输出字段之一是ISIACT字段,只要检测到任何光线和周围场景对象之间的碰撞就会变为真实。
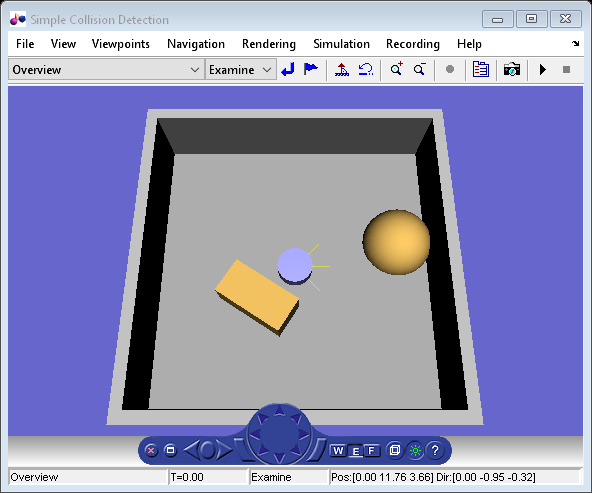
具有3个可见黄色检测光线的LinePickSensor附接到机器人的琐碎模型(由蓝色圆筒表示)。机器人在一个有几个障碍物的房间内。在仿真过程中,机器人向前移动,只要其传感器不会反弹到墙壁或障碍物中即可。使用左右按钮转动机器人,以便前方有自由路径,机器人开始再次移动。
在该模型中,定义了与相同虚拟场景相关的VR接收器和VR源块。VR源用于读取传感器isact信号和机器人的当前位置。VR接收器用于设置机器人位置/旋转和颜色 - 机器人在阻止时变为红色。
在虚拟世界中,有两个观点定义 - 一个静态 - “概述”,一个附加到机器人的一个静态“关注机器人”。从不同的角度来看,改变后者看到现场。

您还可以从以下列表中选择一个网站: