主要内容
倒立摆
vrpend示例说明了在Simulink®中动态模型与虚拟现实世界交互的各种方式。万博1manbetx它是由PID控制器控制的二维倒立摆模型。这个模型与“普通”倒立摆模型的区别在于可视化和设置设定值的方法。通过使用轨迹图和VR Sink块,你可以可视化并与虚拟世界进行交互。轨迹图块允许你跟踪历史的钟摆位置和改变设定值。设置设置点的方法可以在轨迹图块的掩模中选择。有以下几种方法:
鼠标——在“轨迹图”2-D窗口中单击并拖动鼠标指针
输入信号-外部轨迹图输入在这个模型中由随机数发生器驱动
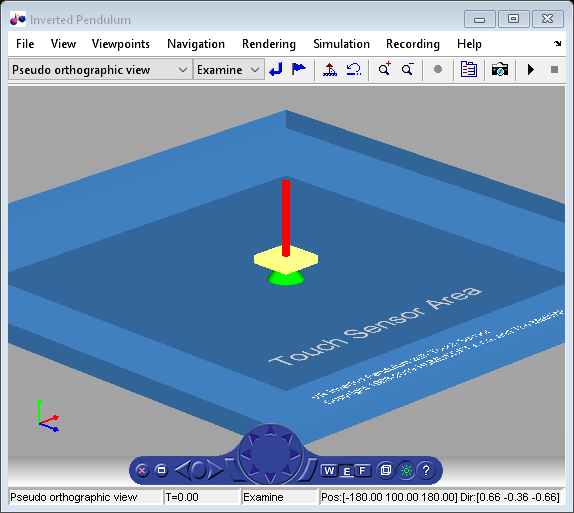
VR传感器-激活来自VRML触摸传感器的输入
当VRML查看器中的指向设备移动到主动触摸传感器区域时,光标形状从箭头变成手形。当设定值选择方式为VRSensor时,鼠标左键单击可设置新的设定值。
注意在关联的VRML文件中定义的伪正投影视图。这个效果是通过创建一个远离感兴趣对象的视点来实现的,这个视点的视野非常窄,由VRML FieldOfView参数定义。直角视图对于消除使用广角镜头时发生的全景失真很有用。这种技术在摄影中也很有名。这种技术的缺点是,在一定距离内定位视点会使标准的查看器导航在某些导航模式下变得棘手或困难。如果你想在虚拟的摆台周围导航,我们建议你切换到其他的观点。

你也可以从以下列表中选择一个网站: