机器人使用全局坐标移动负载
此示例说明了在Simulink®3D动画™模型中使用全局坐标。万博1manbetx全局坐标可以在模型中以多种方式用于对象跟踪和操纵,简单的碰撞检测,触觉效果的模拟等。
通过VR源块可获得虚拟世界中对象的全局坐标。对于场景中的每个变换,VR源块的参数对话框中的树视图也显示延期分支。你可以选择翻译_和Rotation_abs.字段。虽然没有这个领域_abs.后缀输入Simulink®模型对象的万博1manbetx本地坐标(相对于模型层次结构中的父对象),具有此后缀的字段包含对象的全局坐标。
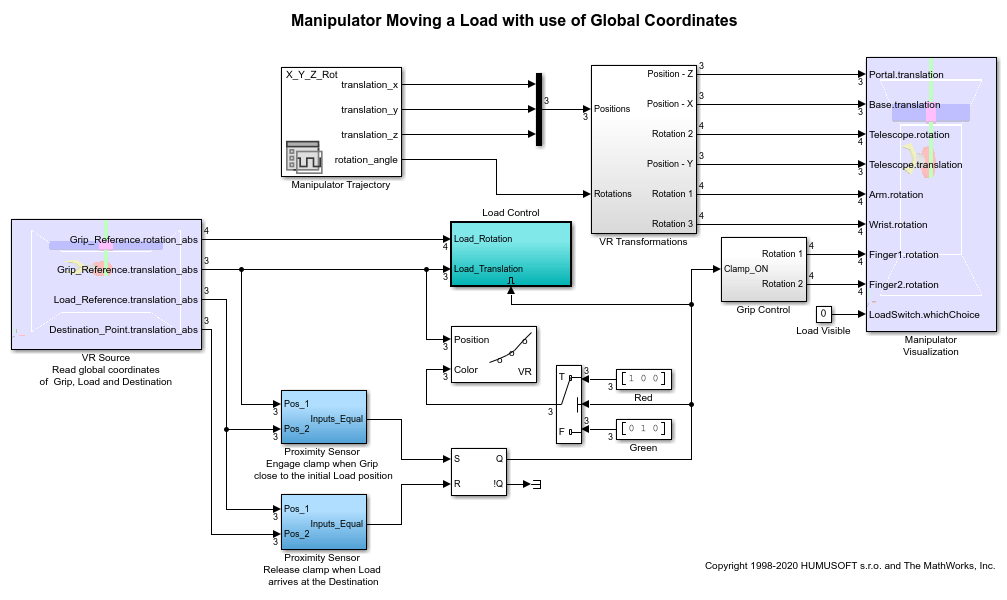
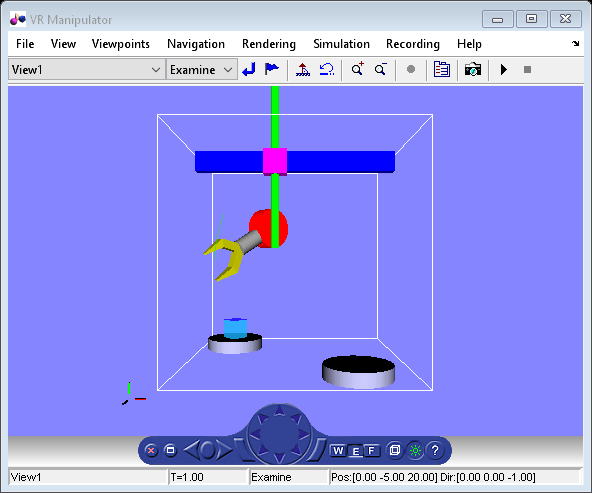
VRML模型代表核热室操纵器。操纵器任务是将负载从一个灰圆柱平台移动到另一个灰色圆柱形平台。操纵器末端执行器的轨迹使用信号编辑器预定义。操纵器臂的每个部分都是使用分解的轨迹组件独立致动,以及VR扩展器块的帮助(见VR转换子系统)。
左侧的VR源块捕获负载操作的所有对象的全局坐标 - 操纵器握把参考点(夹具的中心),目标参考点和负载的初始位置。虽然可以在全局坐标空间中容易地读取负载和目的地坐标,但是操纵器握持位置由形成层次结构的操纵器臂部件的复杂运动产生。通过场景中分层关系影响的这种对象的全局坐标计算通常非常困难,Simulink 3D动画提供了一种简单的方法如何将它们读入Simulink模型。万博1manbetx
一旦众所周知,一旦所有重要对象的全局坐标都是已知的,它很容易实现一个简单的操纵器控制逻辑。第一蓝接近传感器检测机器人在初始负载位置到达。传感器输出变化真的,其结果如下:
启用了深度负载控制子系统。从现在来看,使用附加的VR接收器块将操纵器握把的位置和旋转写入到负载对象的各个字段中。负载开始遵循Grip参考点。
操纵器夹子啮合(手指关闭)。
终端效应器轨迹由VR示踪块创建,从绿色变为红色。
一旦负载到达目的地,第二个蓝色接近传感器被激活,该传感器恢复所有三个状态 - 负载位置变得独立于抓地力,释放机械手夹,并且夹持到空闲位置的抓握轨迹以绿色绘制。
两个传感器提供S-R型触发器块,实现所需的设置复位逻辑。
您还可以从以下列表中选择一个网站: