主要内容
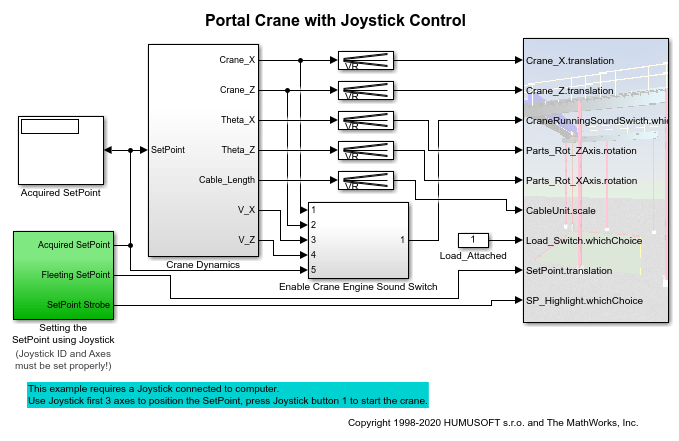
带有操纵杆控制的门式起重机
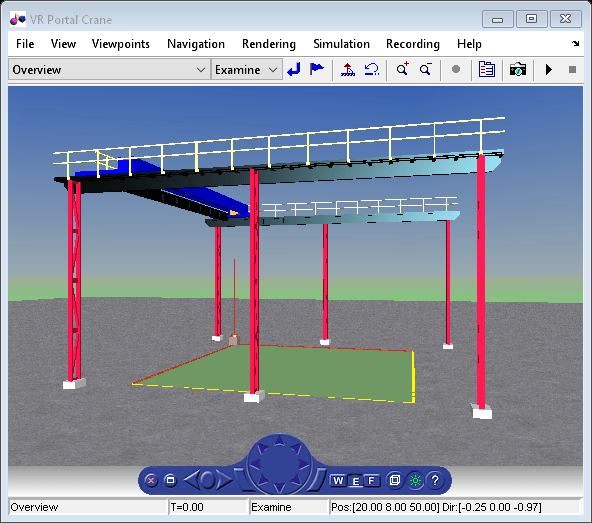
vrcrane_joystick示例演示了Simulink®模型如何与虚拟世界交互。万博1manbetx在Simulink中建立了门式起重机的动力学模型,并在虚拟现实中实现了可视化。万博1manbetx该模型使用操纵杆输入块控制设定值。操纵杆3轴用于控制设定位置,按钮1用于启动起重机。
为了最小化Simulink模型和虚拟现实世界之间传输的信号数量,并尽可能保持模型的简单和灵活,只有最小的移动对象属性集从模型发送到VR万博1manbetx Sink块。描述虚拟现实对象移动所需的所有其他值都是使用写在关联VRML文件中的VRMLScript从这个最小值集计算出来的。
有关如何实现crane模型层次结构和脚本逻辑的详细信息,请查看相关的评论VRML文件portal_crane。X3d在文本编辑器中。
这个例子需要一个标准的操纵杆,至少3个独立的轴连接到计算机。
确认:
门式起重机VRML模型是基于斯洛伐克共和国布拉迪斯拉发斯洛伐克技术大学自动控制系统系Martin Foltin先生和Samuel Bartos先生所做的工作。
你也可以从以下列表中选择一个网站: