主要内容
无人机竞争榜样
这sl3dex_uav.示例示出了虚拟碰撞传感器如何用于交互地控制模拟,并使用Simulink®3D动画™更改虚拟世界对象的外观。万博1manbetx该示例代表了一个简单的无人驾驶飞行器(UAV)挑战。
无人机竞赛场景是基于2013年在法国图卢兹举行的IMAV飞行比赛。(http://www.imav2013.org.)
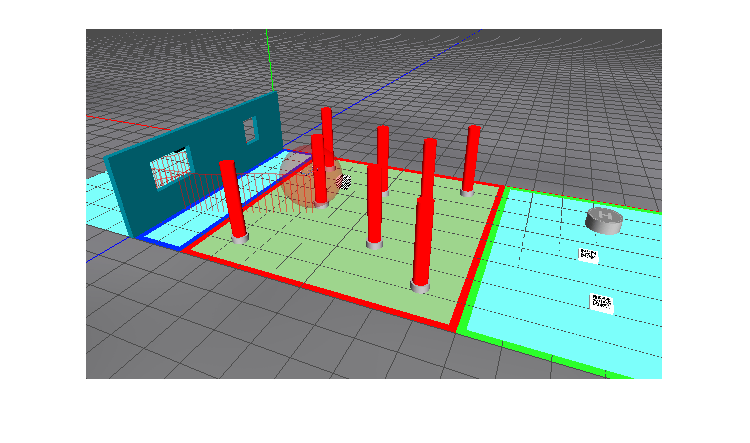
竞争任务是飞过蓝墙中的较大窗户,通过蓝色着陆区的直升机障碍物的障碍物和土地。在穿过起始窗口时开始飞行时间,并且在UAV在Helipad降落时,模拟停止。在飞行期间,注册了与障碍杆的碰撞次数。在过启动窗口之前,击中蓝色启动墙未经惩罚,您可以进入起始窗口。

默认情况下,该模型设置为UAV以遵循预定义的轨迹。您还可以使用SpaceMouse(R)来控制无人机并手动将其穿过障碍物到着陆垫上。要更改导航源,请在模型中切换间隔座/预定义导航交换机块。
在相关的虚拟世界中,有四个原始专用传感器定义的节点检测与各种目标几何形状的UAV的冲突 - 起始墙,起始窗口,橙色障碍杆和着陆的直升机焊接。传感器为模拟提供以下反馈:
击中起始墙只会改变墙壁颜色
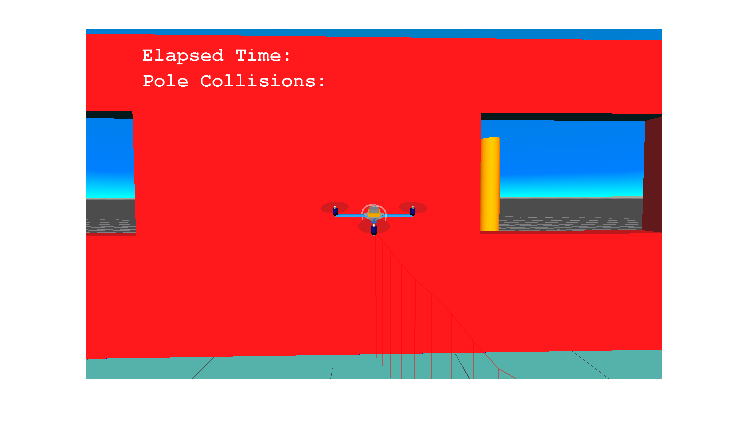
传递起始窗口开始挑战的经过时间,

与障碍物的碰撞是注册并计数得分
在Helipad的登陆停止模拟,并将UAV转子叶片的视觉外观设置为静态状态。
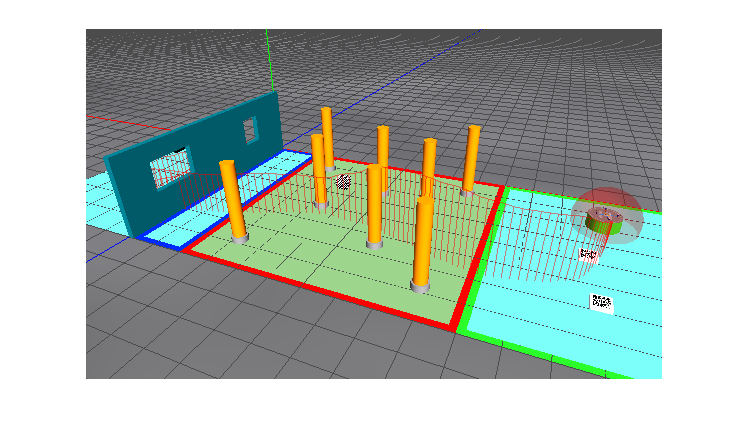
碰撞是近似的 -原始士声师检测透明盒的碰撞(UAV_Collision_box.box.)缠绕在无人身上。
在该模型中,有VR接收器,VR源和VR文本输出块,与同一虚拟世界相关联。VR源用于读取传感器信号。VR接收器用于设置虚拟世界对象的UAV位置/旋转和视觉属性。VR文本输出块更新HUD显示文本。
您还可以从以下列表中选择一个网站: