直流电动机的基准跟踪的参数变化
这个例子展示了如何产生LTI模型表示从仿真模型的控制系统的植物的变化的阵列。万博1manbetx的模型本阵列用于在控制系统设计为控制设计。
直流电机模型
在衔铁控制的直流电动机,所施加的电压弗吉尼亚州控制所述角速度![]() 轴。DC电机的简化模型如下所示。
轴。DC电机的简化模型如下所示。
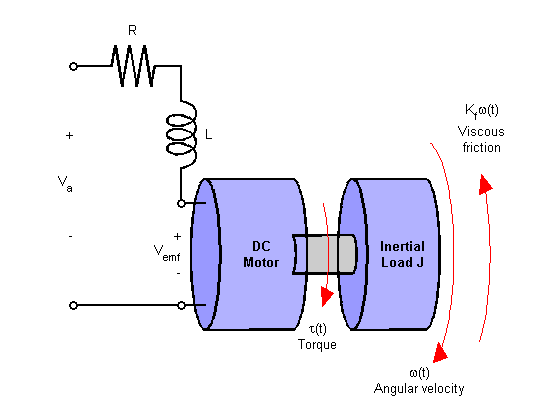
打开该直流电动机S万博1manbetximulink模型。
MDL ='scdDCMotor';open_system(MDL)
![]()
执行批量线性化
控制器的目标是提供跟踪到步骤变化基准角速度。
对于这个例子,用于马达的物理常数是:
[R= 2.0 +/- 10%欧姆大号= 0.5亨利千米= 0.1转矩常数KB= 0.1反电动势常数KF= 0.2 NMSĴ= 0.02 +/-0.01公斤平方公尺/秒2
需要注意的是参数[R和Ĵ被指定为一个值的范围。
要设计一个控制器,它会为所有物理参数值工作,通过抽样这些值来创建一组有代表性的植物。
对于参数[R和Ĵ,用自己的名义,最小值和最大值。
R = [2,1.8,2.2];J = [0.02,0.03,0.01];
要创建植物模型的LTI数组,批量线性化DC电机厂。为的样本值的每一种组合[R和Ĵ,线性化Simulink模型。万博1manbetx为了这样做,指定为显示在模型在控制器块和与在负载块的输出的循环开口的线性化输出点的输出的线性化输入点。
获取模型中指定的线性分析点。
IO = getlinio(MDL);
改变设备参数[R和Ĵ。
[R_grid,J_grid] = ndgrid(R,J);PARAMS(1)请将.Name ='R';PARAMS(1)。价值= R_grid;PARAMS(2)请将.Name ='J';PARAMS(2)。价值= J_grid;
线性为每个参数值组合模型。
SYS =线性化(MDL,IO,则params);
开放式控制系统设计
打开控制系统设计,并导入植物车型的阵列。使用下面的命令。
controlSystemDesigner(SYS)
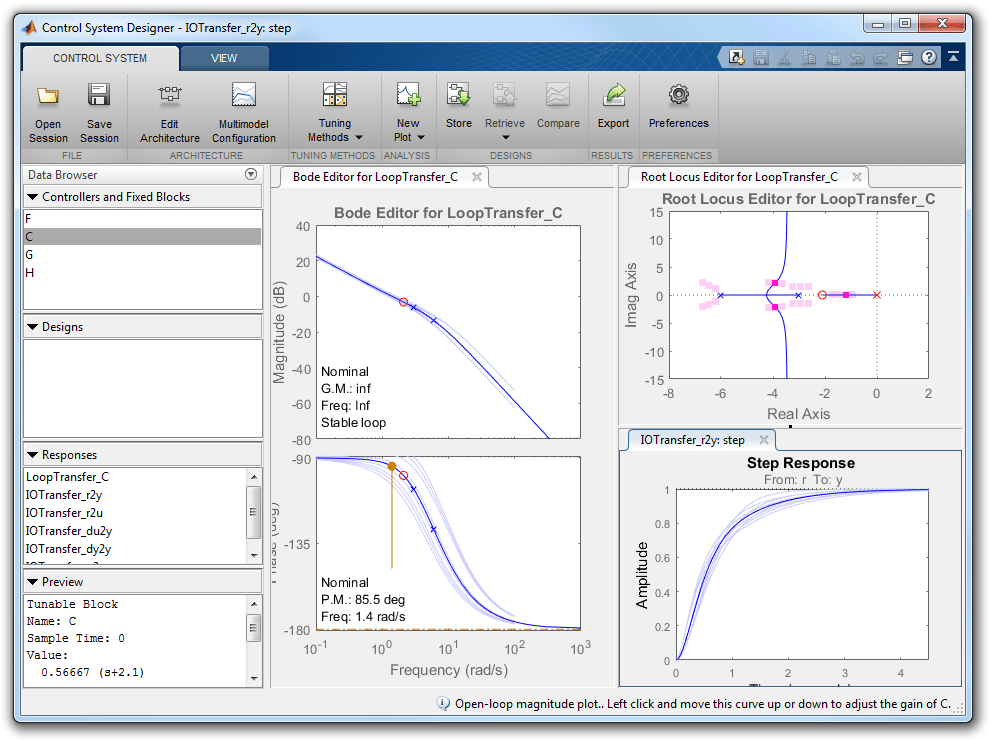
运用控制系统设计,你可以设计标称系统模型的控制,同时,如下图所示同时可视化的其他植物模型的效果。

根轨迹编辑器显示根轨迹的名义模型,并与其他植物模型相关的闭环极点位置。
伯德编辑器显示两个标称模型响应和其他植物模型的响应。
阶跃响应表明,引用跟踪没有为任何设备模型的实现。
控制器设计
使用的工具控制系统设计,设计为参考跟踪下面的补偿器。
![]()
将得到的设计如下所示。闭环阶跃响应表明,参考跟踪的目标是与零稳态误差来实现在植物集合定义的所有模型。但是,如果零利率超调的要求是必要的,但并非所有的反应将满足这一要求。
出口设计和验证在Simulink模型万博1manbetx
要导出所设计的控制器到MATLAB工作区,点击出口。在导出模型对话框中,选择C和点击出口。写控制器参数的Simulink模型。万博1manbetx
[CNUM,CDEN] = tfdata(C,'V');HWS = get_param(MDL,'modelworkspace');assignin(HWS,'CNUM',CNUM)assignin(HWS,'CDEN',CDEN)
更多信息
有关使用的多模式功能的详细信息控制系统设计见多模式控制设计(控制系统工具箱)。
bdclose('scdDCMotor')
您还可以选择从下面的列表中的网站: