遵循一个颜色对象使用烦恼V5的视觉传感器
这个例子展示了如何使用仿真软件®编码器™支持包烦恼®EDR 万博1manbetxV5机器人大脑万博1manbetx来控制一个机器人在街机模式遵循一个颜色对象V5视觉传感器探测到。
介绍
万博1manbetx仿真软件编万博1manbetx码器支持包烦恼EDR版本5的机器人的大脑提供了一个视觉传感器元件,它可以用于分析一个颜色blob V5视觉传感器探测到。块输出x和y坐标、高度和宽度的颜色斑点检测的视野V5 Vsion传感器,根据你选择的颜色特征。
在这个例子中,您将学习如何:
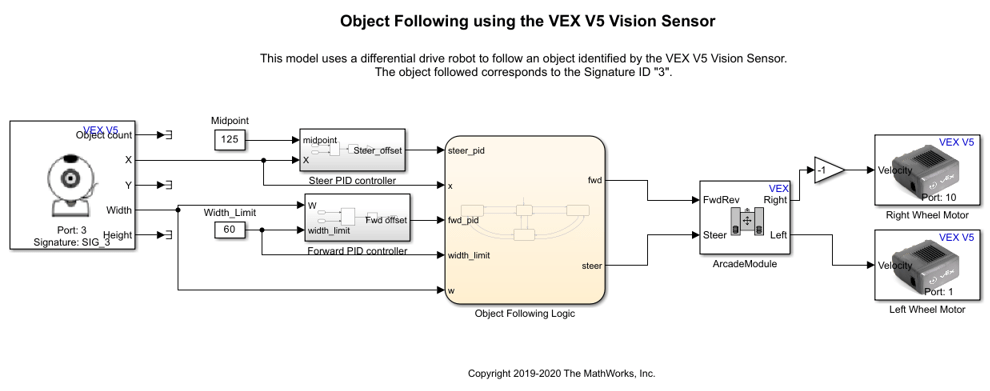
使用检测到的x坐标和宽度颜色斑点,视觉传感器的输出块,作为配置对象的引用跟踪逻辑
使用一个对象跟踪逻辑,使用仿真软件Stateflow®来计算所需的值向前/向后万博1manbetx运动和转向控制的机器人
使用一个街机模块块(支持包中可用),使用Stateflow的输出来控制机器人的左、右马达万博1manbetx
先决条件
如果你是新模型,观察万博1manbetx万博1manbetx仿真软件快速入门视频。
完成开始使用烦恼EDR V5支持包的例子。万博1manbetx
所需的硬件
要运行这个示例,您需要以下硬件:
烦恼EDR版本5的机器人的大脑
V5视觉传感器
V5智能汽车(2)
两轮机器人平台
V5机器人电池
智能电缆600毫米(2)
300毫米智能电缆
USB微电缆
任务1 -硬件连接
1。V5机器人电池连接到烦恼EDR版本5的机器人的大脑。
2。烦恼EDR V5机器人大脑连接到你的电脑使用USB电缆。
3所示。连接两个V5智能汽车两个智能港口V5机器人的大脑,使用两个600毫米智能电缆。正确的电机连接到智能港口10和左边的汽车智能端口1。
4所示。V5幻影传感器连接到智能港口3 V5机器人的大脑,使用300毫米智能电缆。
5。连接两个V5智能汽车的两个轮子的机器人
模型
万博1manbetx仿真软件编万博1manbetx码器支持包烦恼EDR版本5的机器人的大脑提供了一个预配置模型(vexv5_follow_object),您可以使用它们来控制一个机器人在街机模式使用V5的视觉传感器。
打开模型,在MATLAB®命令提示符运行以下命令:
open_system (“vexv5_follow_object”);
视觉传感器模型使用的块SIG_3作为标志性的颜色被检测出来。
请注意:配置一个颜色您指定的签名视觉传感器块,您需要使用烦恼视觉实用程序。细节保存颜色签名V5视觉传感器使用扰乱视觉实用程序,请参阅提到的步骤火车V5视觉传感器颜色签名。
任务2 -配置补偿对象视觉传感器探测到
在预配置模型(vexv5_follow_object),我们使用两个配置所需的补偿对象的PID控制器检测到V5幻影传感器领域的观点。
引导PID控制器:指定的中点的视野,我们连接常数块与价值125年。的Steer_offsetPID控制器的输出是基于当前计算X价值的视觉传感器块和你指定的中点。
PID控制器:转发到指定的宽度限制检测颜色blob(这决定了停止距离的V5视觉传感器对象),我们连接常数块与价值60。的Fwd抵消PID控制器的输出是基于当前计算W价值的视觉传感器块和宽度限制指定。
任务3 -使用Stateflow配置对象的跟踪
模型在这个例子中,我们使用一个Stateflow图表创建逻辑有助于跟踪对象。双击对象在逻辑stateflow查看状态。
Stateflow图表包含三个国家使用fwd_pid和steer_pid输入驱动机器人,机器人和一个州停止:
TurnLeft:这种状态配置为将机器人向左如果V5视觉传感器检测的对象X价值不到100W值小于宽度的限制。
TurnRight:这种状态配置为将机器人向右如果V5视觉传感器检测的对象X价值超过150W值小于宽度的限制。
MoveForward:这个状态配置为移动机器人前进方向对V5视觉传感器已经对齐后的对象使用引导控制的机器人检测到对象状态。机器人停止向该对象,直到发现宽度(视野)是一样的宽度限制,你指定。
任务4 -连接拱廊模块和智能电动机写块
万博1manbetx仿真软件编万博1manbetx码器支持包烦恼EDR版本5的机器人的大脑提供了一个街机模块块接受单独的输入控制和引导控制,然后驱动电机连接到它的输出。
连接前轮驱动和引导输出从stateflow图表FwdRev和引导商场模块的输入块
连接两个智能电动机块写入正确的和左商场模块的输出端口。连接正确的车轮马达,我们也包括获得块与价值1汽车在同一方向移动。确保聪明的港口参数在两个智能港口写块匹配任务1的实际端口连接。
任务5 -使用V5部署模型和跟踪对象的视觉传感器
1。烦恼V5机器人大脑连接到主机使用USB电缆。
2。仿真软件模型中万博1manbetx去硬件选项卡并单击构建、部署和启动。代码部署成功后,开始运行模式V5机器人的大脑,和坦克机器人开始不断向左转。
3所示。把彩色物体接近V5的视野视觉传感器,而机器人正试图使用传感器检测对象。
请注意:物体的颜色应该匹配的颜色你用来训练V5视觉传感器所选颜色的签名使用扰乱视觉实用工具。在这个例子中,幻影传感器块被配置为检测SIG_3。
机器人检测对象,并试图使视野的中点(基于检测到X价值的V5视觉传感器)。
一旦中点对齐,机器人推进到对象,直到检测到对象的宽度在视场匹配指定的限制。